Interfacing for Continuum Robots CuRL
As our chosen teleoperative input device, we used a Kinova Mico Research Arm: a kinematically non-redundant, rigid link arm with 6 DoF (seen below). The Mico Arm was chosen because it is representative of the large range of anthropomorphic robotic arms and its size allows for easy manipulation by a human user. During experiments, the Mico Arm was placed in ”float” mode, which allowed the user to manipulate the arm freely while the robot automatically compensated for gravity at each joint.
C. G. Frazelle, A. D. Kapadia, K. E. Fry, and I. D. Walker. Teleoperation Mappings from Rigid Link Robots to their Extensible Continuum Counterparts. In the Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, May 2016.
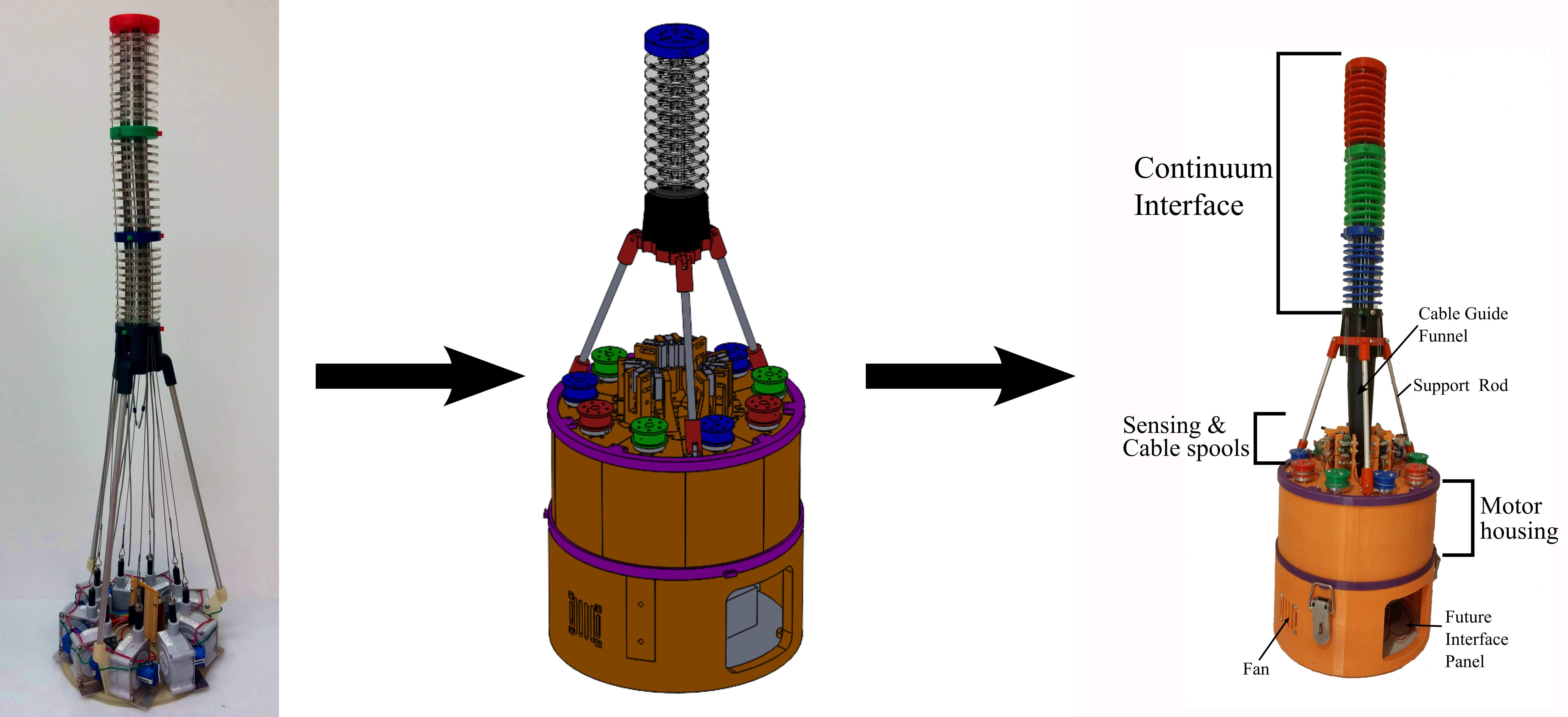
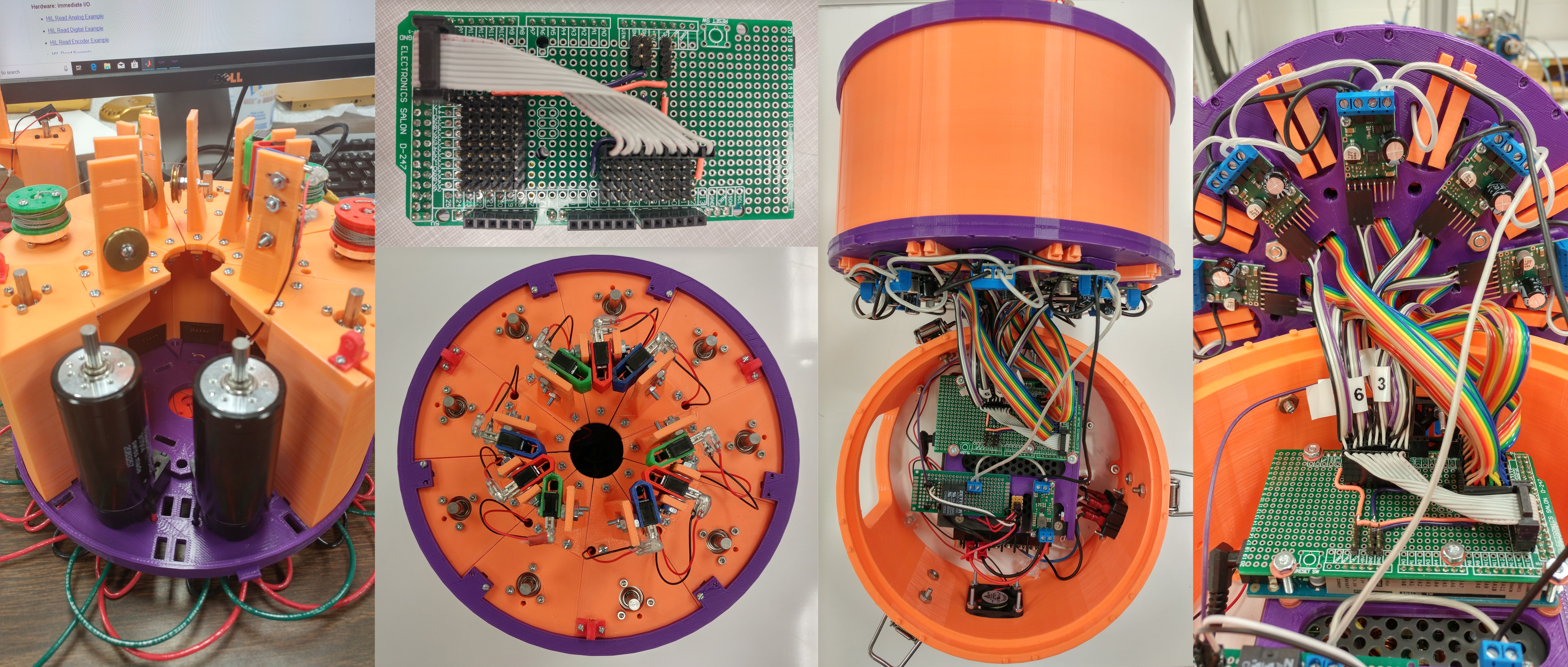
The configuration of the MiniOct is measured using nine cables, three cables for each section, placed 120 degrees apart. The lengths of the cables are approximated using string potentiometers placed symmetrically in a circle at the base of the device. Constant curvature kinematics converts these measured cable lengths to relevant configuration parameters.
Publication
C. G. Frazelle, A. D. Kapadia, and I. D. Walker. Developing a Kinematically Similar Master Device for Extensible Continuum Robot Manipulators. ASME Journal of Mechanisms and Robotics, 10(2), doi: 10.1115/1.4039075, April 2018, pp. 025005-1-8.
Publication
C. G. Frazelle, A. D. Kapadia, and I. D. Walker. A Haptic Continuum Interface for the Teleoperation of Extensible Continuum Manipulators, in IEEE Robotics and Automation Letters, vol. 5, no. 2, April 2020, pp. 1875-1882.