 Road Datasets
Road Datasets
Road Datasets
Road Datasets
This webpage contains road condition and hazard datasets for out experiment captured by smartphones mounted in multiple vehicles.
The road condition dataset consists of two types, vision-based road condition data and motion based road condition data. Vision based data includes Images of road conditions such as potholes, cracks, bumps, etc. at and around Greenville, SC, USA area and also few publically available images of such hazards. Motion based data includes acceleration data of vehicle going over various road conditions collected at and around Greenville, SC, USA area. For the experiment vision based and motion based data was also captured for undamaged roads.
The road hazard dataset consists motion based road hazard data. Motion based data includes acceleration data of vehicle going over various road conditions collected at and around Greenville, SC, USA area. For this dataset, BeamNG Tech softare was used to collect the motion based road hazard data as well.
The smartphone mounted on the windshield records the sensor data (Refer Figure 1). The data used for this experiment was collected over various roads of Greenville, Spartanburg, Clemson,and Columbia area in South Carolina, USA.


For this experiment, the data was collected from real world and simulation. The Real world data was collected from the smartphone mounted on the windshield that records the motion data. The data used for this experiment was collected over various roads of Greenville, Spartanburg, Clemson,and Columbia area in South Carolina, USA (Refer to Figure 1).
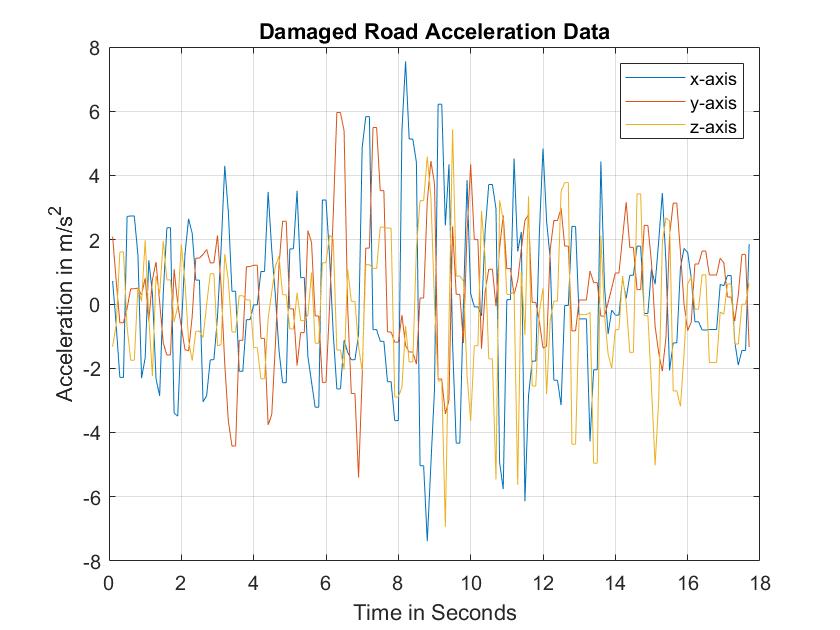
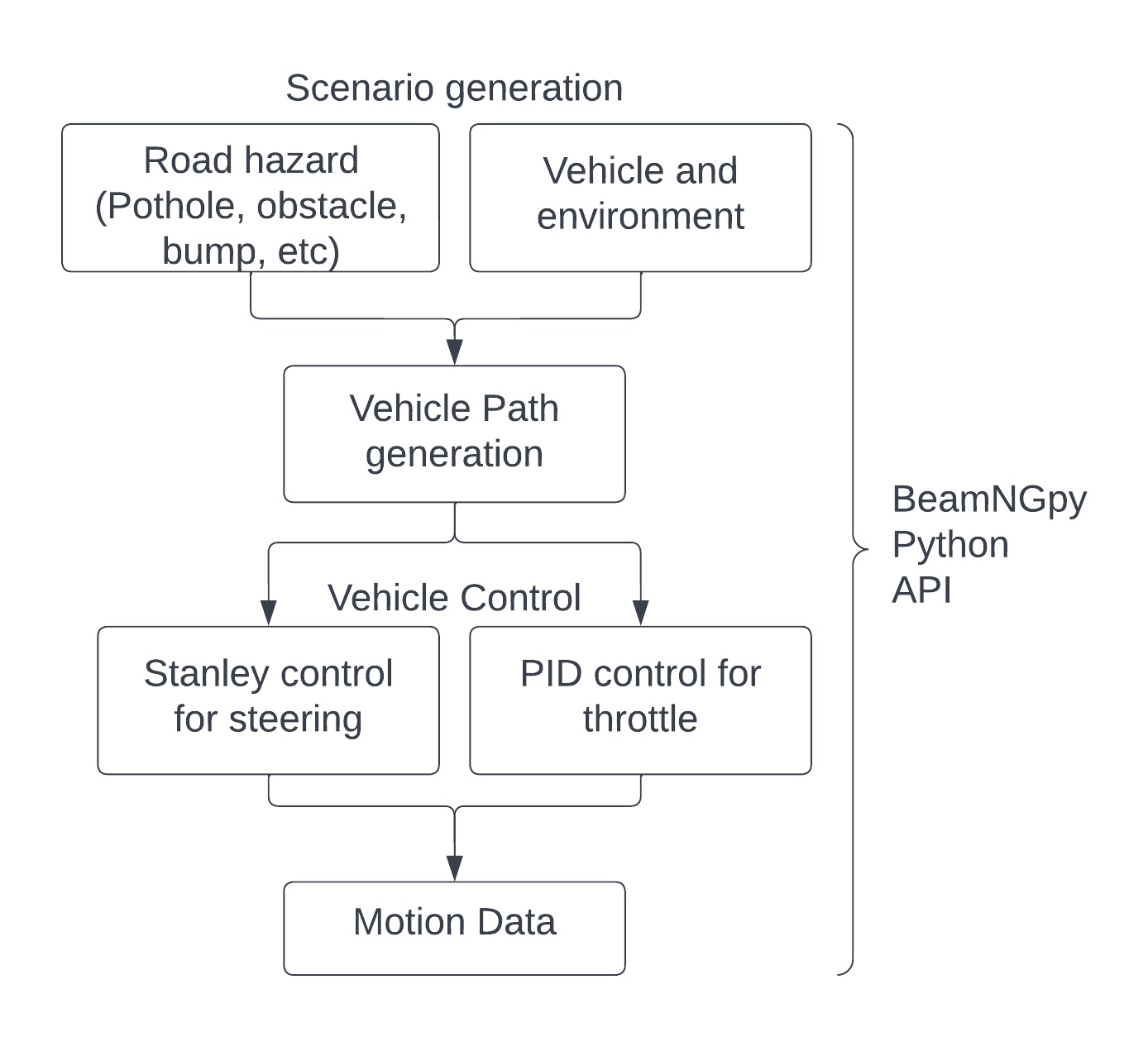
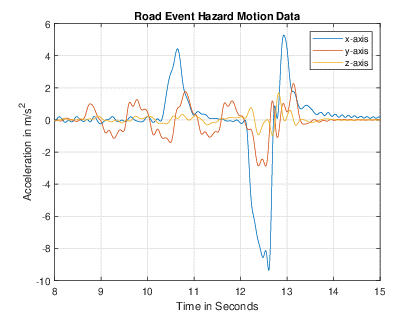
The Simulation-based data was collected from BeamNG simulation platform. Motion data captured over potholes is provided by the BeamNG's accelerometer sensor. BeamNG is a true, high-fidelity soft-body car simulation program that produces realistic vehicle behavior. The simulation vehicle's G-Force/Acceleration sensor captured the motion data, which BeamNGpy allowed users to access (Python-based API). BeamNG Tech software is used to generate the required road hazard data and the data generation framework can be seen in figure 4 Figure 5 represents the simulation environment and a pothole example. Figure 6 represents the acceleration data collected for road event hazard.
The data collection was done using multiple vehicles. The different types of road hazards covered during data collection are road event hazard and road defect hazard. Road event hazard corresponds to unexpected obstacles on the road that a vehicle needs to avoid by going around. These unexpectedobstacles can be a dead animal, accidental car etc. Road defect hazard corresponds to potholes or bumps that vehicle goes over and produces vertical acceleration.


Road Condition Dataset: There are 2 main folders under the root directory corresponding to Image based and Motion based data. Image data includes two sub folders containing images and respective labels of these images. Motion data folder contains four sub folders containing original .mat and .txt files and normalized and final preprocessed data. A readme document is created in the main folder containing detailed guidelines on parsing the data.
Road Hazard Dataset: This dataset contains three sub-folders for four different tests. All the data in these folders represents acceleration data collected from the BeamNG simulation platform, and experimental data collected from the smartphones mounted in multiple vehicles. Each sub-folders have two sub-folders containing data: Kalman Filtered or Low-pass filtered. Each of these sub-folders further contains the following data. A readme document is created in the main folder containing detailed guidelines on parsing the data.
Bhosale, M.; Guo, L.; Comert, G.; Jia, Y. On-Board Smartphone-Based Road Hazard Detection with Cloud-Based Fusion. Vehicles 2023, 5, 565-582.(Uses Road Hazard Dataset) doi: 10.3390/vehicles5020031 .
Ramesh, A.; Nikam, D.; Balachandran, V.N.; Guo, L.; Wang, R.; Hu, L.; Comert, G.; Jia, Y., "Cloud-Based Collaborative Road-Damage Monitoring with Deep Learning and Smartphones" in Sustainability 2022, 14, 8682.(Uses Road Condition Dataset), doi: 10.3390/su14148682 .
You can download the dataset with the link below:
Road condition dataset 2020Road Condition Dataset Project Page/Clemson University/Collaborative Robotics and Automation (CRA) Lab/yunyij@clemson.edu