Safety Advantages of Connected and Integrated Automotive Control Systems
by Jens Baehrle, Clemson Automotive Engineering Graduate Student
- Introduction
-
Integrated systems are already used in cars today. We are talking about systems like anti-lock-braking, traction control and electronic stability control. These systems were developed over the years and they have changed with the available technology. A typical car today combines the functions ABS, TC and ESC in one system. There is just one hydraulic actuator and one controller. All hydraulic valves, additional pumps, etc. are controlled by this single controller. Various sensors can be shared by these systems (e.g. wheel speed sensor).
This creates a lot of advantages (e.g. reduced number of sensors, actuators, wires, hydraulic lines and controller); but the integration of functions into one system is not the only way to combine functionality in a car. Event controlled and high speed data communication between systems offer the chance to combine functions in different systems. Related to the example of a combined ESP system this could mean that the TC function does not necessarily just use the brake actuators. It is also possible to request an action of the engine controller to reduce the engine torque in order to keep the vehicle stable.
This was an example for an existing system. New developments lead more and more to integrated and “by-wire” controlled systems. Today it is possible to control the throttle and the brakes. So the vehicle control systems can handle most of the longitudinal driving situations. With the introduction of the electronic power steering systems now could be able to handle lateral driving situations as well. Depending on the mechanical override system the EPS is using the system could be applied to support several safety and driver assistance systems.
- Mechanical function of an EPS:
-
- Angle override, adds a certain angel to the wheels
- Torque override, supports driver’s input with additional torque. Counter steering and high force inputs are possible
- Actual functions of an EPS
-
- offering efficiency advantage
One of the most important reasons to use an EPS today is the efficiency. There are less mechanical losses because the hydraulic pump doesn't need to be powered all the time. So the EPS can lead to a better fuel consumption and less emissions.
- adaptive steering angle and forces for different vehicle speeds
A system that is able to change the steering wheel angle and the necessary steering forces provided by the driver can be used in different assistance systems. On a highway (higher speeds, long turns) small corrections or vibrations in the steering wheel shouldn't lead to extreme reactions on the axle. On the other hand driving in cities and neighborhoods or while parking situations a small steering wheel angel should lead to a big steering angle on the axle and the forces applied to the steering wheel in low speed situations (parking, high friction of tires) should be small to assist the drivers in the most efficient way.
- automated parking
In combination with other sensors and systems the EPS can be used for automated parking. Acoustic sensors for the orientation “lead” the way and the EPS, throttle control and braking actuators drive the car. This fully automated parking scenario is possible with actual technology but it is not used in its full range of possibilities due to legal regulations.
- Problems and limits of an ESP system
-
These were examples for classical steering situations. Situations every driver is familiar with. Furthermore, an input into the steering angle could lead to enormous advantages in safety functions. There are some systems on the market which are already able to communicate with the ESP system to support critical driving situations.
- ESP/ABS in µ-split braking situations
The application of the anti-lock braking function is limited to the friction between tire and road. An extreme low-µ environment (snow, ice) leads to extreme long braking distances if the systems try to prevent the tires from locking. Even more this is a problem in situations that don't seem to be that critical. The so called µ-split braking situation (one tire on high-µ, one tire on low-µ) requires a lot of calculations on adjustments of the support systems. Most actual safety systems work on the so called “select-low”-principle. That means the necessary support is calculated for the low-µ, the critical site.
This would again lead to extremely high braking distances. A way to avoid this is to switch to the high-µ side and control the wheel slip at the wheel that is able to apply braking forces. Due to simple physics this braking situation is creating a moment that turns the car towards the high-µ side of the road (which in reality normally is the opposite driving lane). The easiest way to prevent the car from turning is to apply a steering torque on the steering axle. Advanced drivers are able to handle situations like that with the support of the ESP system. Inexperienced drivers could have problems with the situation though.
This is the point where an EPS system could act, controlled by the yaw-rate controller of the ESP, the EPS applies the necessary steering force. A simple action based on existing sensors and actuators but leading to a security increase for the driver.
- ESP in oversteering situations
One of the most important advantages of an electronic stability system is the support of critical oversteering situations. These situations could lead to a side impact crash or a roll-over crash which are the most dangerous crash situations for the occupants.
A yaw moment needs to be created to obviate an instable driving situation. ESP produces this moment by applying brake force at one wheel. This reaction is limited by the physical circumstances. Countersteering would also lead to a fitting moment. The problems that could occur here are overshooting the correct steering angle and/or a wrong raise of the steering angle. This could lead to an even worse instable driving situation.
A well-controlled combination of a braking and a steering action coordinated by one control unit can reach the highest level of security, even in high speed situations.
- Additional and new functionality – e.g. cross-wind compensation and evasive steering
-
Almost every situation that is normally controlled by a steering action of the driver can be supported by an active steering system. In general electronic systems are faster and more accurate than human inputs. The biggest problems are the sensors and the interpretation of the situation by the system. A human driver can deal with a lot of inputs and makes decisions an electronic system can't. For example a driver notices that his car is moving sidewards because of cross-wind and he recognizes the reason based on separate observations like flying leaves, dust or moving trees. A control system needs to depend on sensor inputs to evaluate the situation. On the other hand a driver can be surprised by abrupt appearing cross wind on a bridge or while leaving the slipstream of a bigger object. A human driver can be surprised because he doesn't expect something to happen while a control system that monitors vehicle sensors can't be surprised; it just acts in predefined situations.
These are the big trade-offs that need to be considered. An assistance system is just allowed to support the driver in situations he really wants or needs the support. If the system not interprets the driver’s intensions correct it could lead to an even worse driving situation or the driver wouldn't accept the system.
So at the moment there is still the question which systems should be used in cars to support and protect the driver without interrupting the driver's intensions or creating dangerous situations. One way to deal with this issue is to use systems just in case of real emergencies or if the driver gives the trigger input. An EPS is able to support the driver in evasive steering situations. Again it needs to be connected or integrated, e.g. using forward looking sensors of the adaptive cruise control.
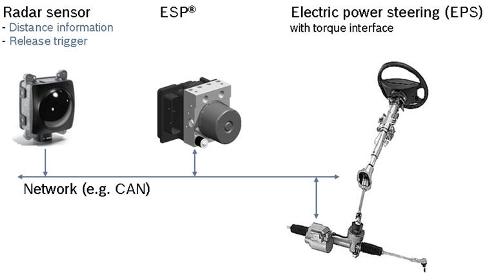 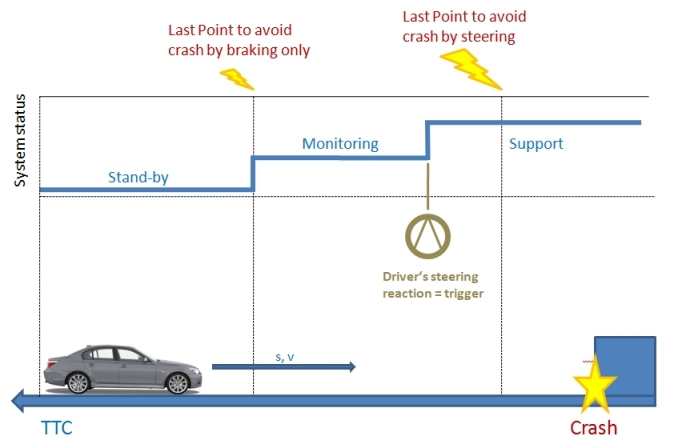
If the radar sensor detects a possible collision object the control unit calculates the so called time-to-collision (TTC). The TTC is compared with several values to interpret the situation. In a first step a warning light could be turned on, it is also possible to warn the driver by a short brake jerk. If the TTC gets smaller a physical point is reached at which it is no longer possible to avoid the crash. If the driver reacts by a steering action the system can interpret this as the trigger to do an evasive steering maneuver. Depending on the system and the driver’s reaction this maneuver could be split into a braking and a steering situation. First of all kinetic energy is destroyed by braking and then, to avoid the crash, a steering angle is provided by the EPS. The trajectory the support system is using can be pre-defined or calculated with additional radar and acoustic (short distance) sensors. The trajectory calculation is very effective for moving objects. Stationary objects can generally be detected early to avoid a crash by a braking maneuver. Moving or suddenly appearing objects can be avoided by an evasive steering.
- For More Information
- [1] From ABS to ESP, Robert Bosch GmbH.
- [2] Info on active steering system, ZF-Lenksysteme.
- [2] Bosch-ZF active steering: mechanical and electronic guidance controls coexisting harmoniously., Goliath.com.
|
