
Scaled-Down Vehicles Testbed
Setup
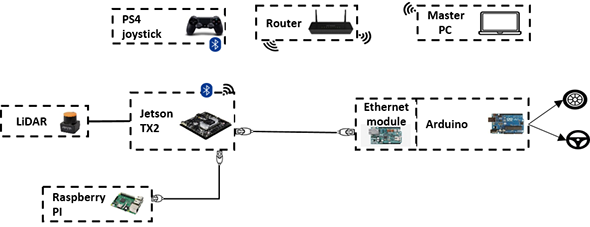
The current setup consists of four Traxxas 2WD racing trucks. Each vehicle is inspired by F1/10 http://f1tenth.org/, and it is equipped with: Jetson TX2, Raspberry PI 3, Master PC, Arduino UNO + Ethernet shield, Hokuyo UST-10LX Lidar, NETGEAR router, PS4 Joystick.
Below a general architecture scheme of vehicles.
Applications and results
The current testbed enables to test autonomous driving and autonomous obstacle avoidance by using neural network approaches.
Autonomous driving: Lidar-based control algorithm (geometrical autonomous driving)

Autonomous Driving: machine learning based control algorithm
Collecting data for training of neural network
Autonomous control based on trained neural network
Autonomous Driving: cybersecurity based on machine learning
A machine learning base detection algorithm is used to detect and counteract the attacker to keep the vehicle safe.
Forward geometrical autonomous driving is switched to a machine learning based autonomous driving when a cyber attack is detected.
Result: attack detected and recovered.