Current Projects

MARTHA 1.3
MARTHA (Miniaturized Avionics for Rapid Testing, Handling and Assessment) is an Avionics printed circuit board that the club has used in previous projects. It collects data on the altitude, acceleration, and direction of the vehicle.
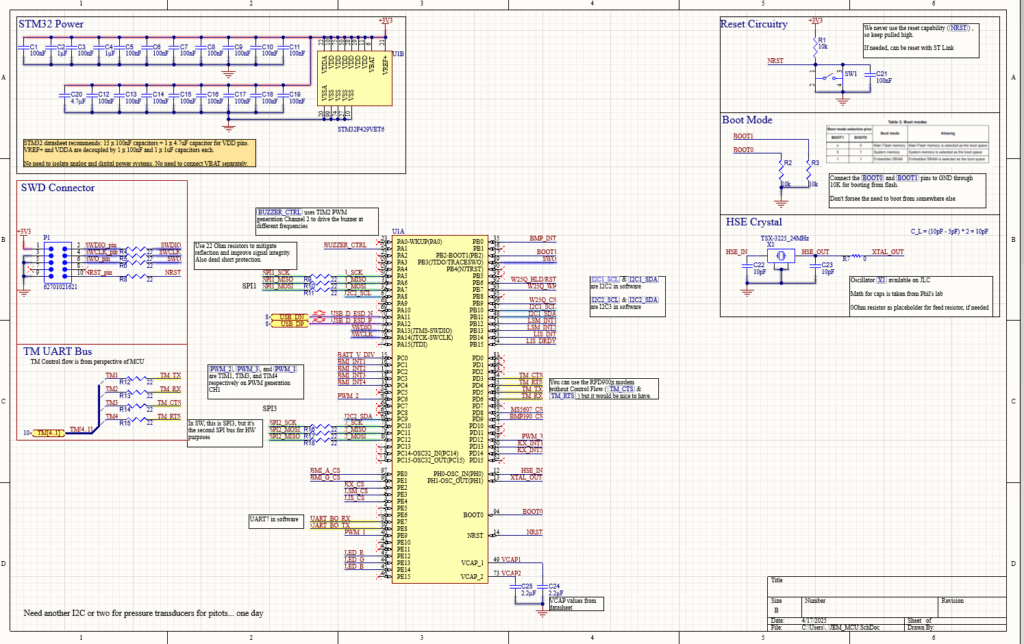
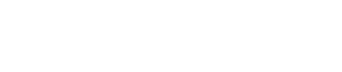
JEM (Just Expanded MARTHA)
The next iteration on our flight computer hardware platform and designed for more advanced projects, JEM applies the lessons and experience of MARTHA at a greater scale. MARTHA’s job is data collection on both certification rockets and larger rockets. JEM’s whole idea is to provide the software team with an enhanced sensor suite and data acquisition capabilities. JEM is designed to acquire lots of data about the flight through accelerometers, IMUs, altimeters, and magnetometers. JEM also has a more elegant power system than MARTHA; it can handle multiple voltages and is complete with power monitoring chips. JEM has miscellaneous connectors to allow for testing, experimentation, and add-ons.
Recovery Bay
The recovery bay is one of the most important parts of the rocket, as it allows the rocket to be retrieved in one piece after reaching apogee. In the recovery bay, the main components are altimeters. These flight computers track the rocket’s elevation and are programmed to activate the e-match for black powder charges at apogee for the drogue parachute and at 1000 feet for the main parachute. When the black powder charge goes off, enough pressure is created to separate the parachute bay and release either the drogue or main parachute. Because the recovery bay is so essential, redundancy is vital within the system. We achieve this by wiring three different altimeters in parallel, which allows for two black powder charges per parachute and two e-matches per charge. This redundancy allows the rocket to lose two connectors on the main charges and one connector on drogue charges and remain operational.

Airbrake Actuation System
Active Aero is an active control system designed to hit a target apogee that mixes clever mechanical engineering and innovative software to dynamically change the drag on the vehicle. If it predicts that the vehicle will overshoot the target apogee, it will deploy a set of flaps acting as brakes to slow down the vehicle to reach the target apogee. The inspiration of this project revolves around a challenge category in IREC, the Barrowman Award, where you get more points the closer you are to a target apogee. If we purposefully overshoot the vehicle for a target apogee and use airbrakes to slow the vehicle on ascent, we can more reliably and accurately hit a target apogee.