Rigid and Non-Rigid Classification Using Interactive Perception
Bryan Willimon, Stan Birchfield, and Ian Walker
Abstract
Robotics research tends to focus upon either noncontact
sensing or machine manipulation, but not both. This
research explores the benefits of combining the two by addressing
the problem of classifying unknown objects, such as found in
service robot applications. In the proposed approach, an object
lies on a flat background, and the goal of the robot is to interact
with and classify each object so that it can be studied further.
The algorithm considers each object to be classified using color,
shape, and flexibility. Experiments on a number of different
objects demonstrate the ability of efficiently classifying and
labeling each item through interaction.
Algorithm
|
|
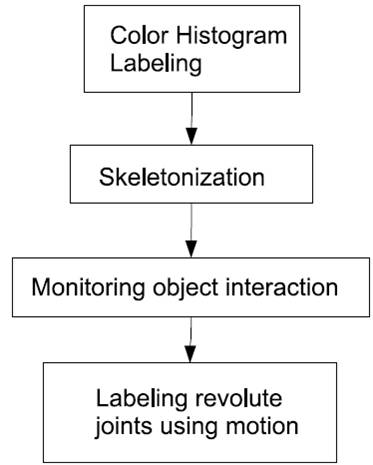
The purpose of this work is to automatically learn the
properties of an object for the purpose of classification
and future manipulation. The figure to the left presents an overview of
our classification process. First, the object is located in the
image, and a color histogram model is captured in
order to model the object. Then, a 2D skeleton of the object
is determined using a standard image-based skeletonization
algorithm. The robotic arm then interacts with the object
by prodding it from different directions. By monitoring the
object's response to these movements, the revolute joints of
the object are computed, as well as potential grasp points.
We focus in this work on revolute joints because they are
common in everyday situations (e.g., stapler, scissors, pliers,
hedge trimmers, etc.) and because they more closely model
the behavior of non-rigid objects containing stiffness (e.g.,
stuffed animals).
|
Experimental Results
The proposed approach was applied in a number of
different scenarios to test its ability to perform practical
interactive perception. A PUMA 500 robotic arm was used
to interact with the objects, which rested upon a flat table
with uniform appearance. The objects themselves and their
type were unknown to the system. The entire system, from
image input to manipulation to classification, is automatic.
|
Articulated Rigid Object |
|
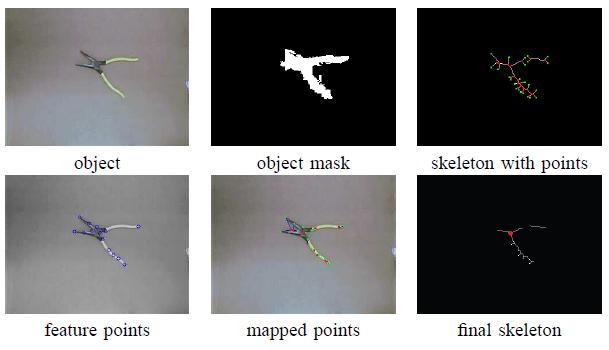
Example of our approach on a pair of pliers. In lexicographic order:
The original image of the object, the binary mask of the object, the skeleton with the intersection points (red dots)
and end points (green dots) labeled, the feature points gathered from the object, the image after mapping the feature
points to the intersection points, and the final skeleton with the revolute joint (red point) automatically labeled.
The red dots represent the intersection points (possible revolute joints) of the skeleton. The green dots represent
the end points (interaction points) of the skeleton.
|
|
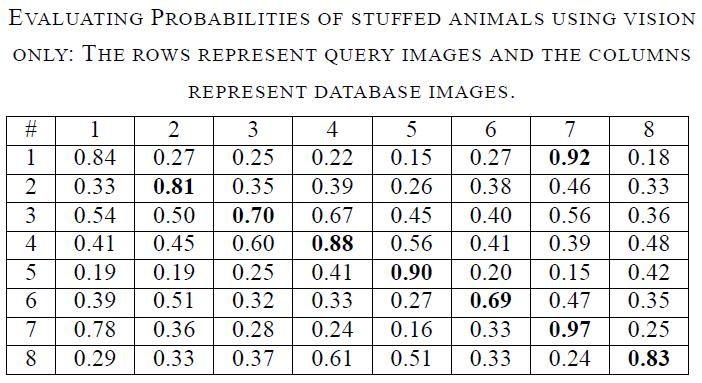
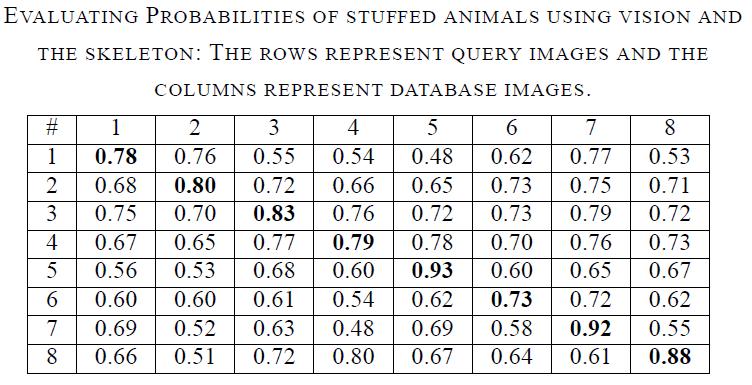
Classification Experiment: Stuffed Animals |
|
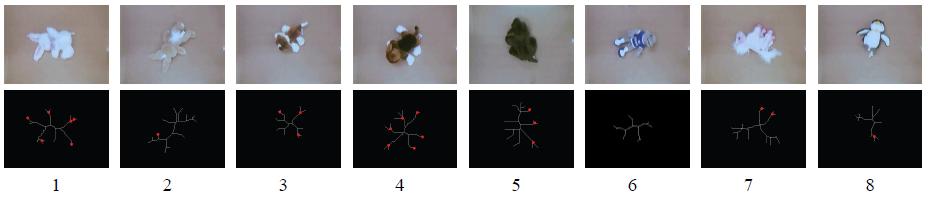
TOP: Images of the individual objects used for creating a database of
previously encountered items. BOTTOM: The final skeletons of the objects with revolute joints automatically
labeled (red dots).
|
|
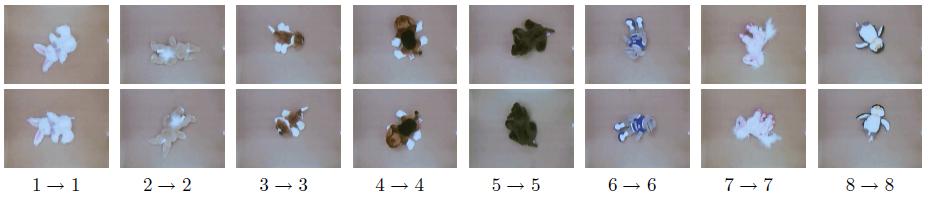
Results from matching query images obtained during a second run of the
system (top) with database images gathered during the first run (bottom). The numbers indicate the ground truth identity
of the object and the matched identity. All of the matches are correct. |
|
|
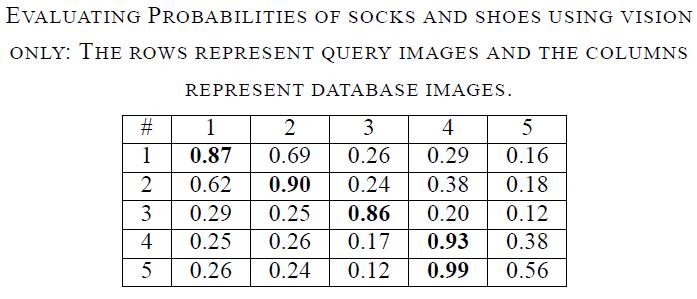
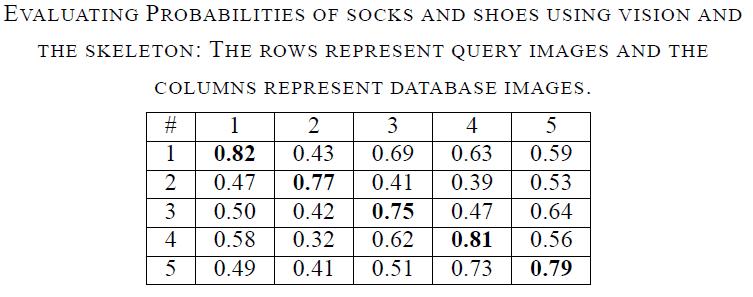
Classification Experiment: Socks and Shoes |
|
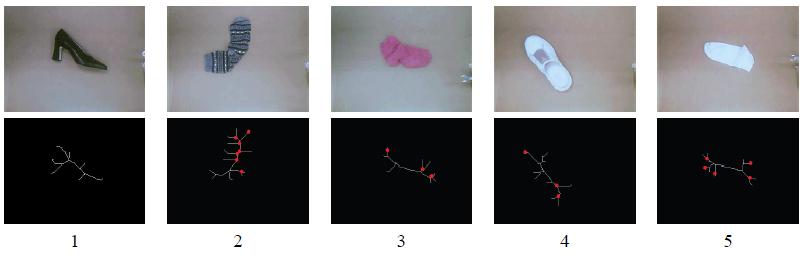
TOP: Images of the individual objects gathered automatically by
the system for the purpose of creating a database of objects previously encountered. BOTTOM: The final skeletons
with revolute joints labeled.
|
|
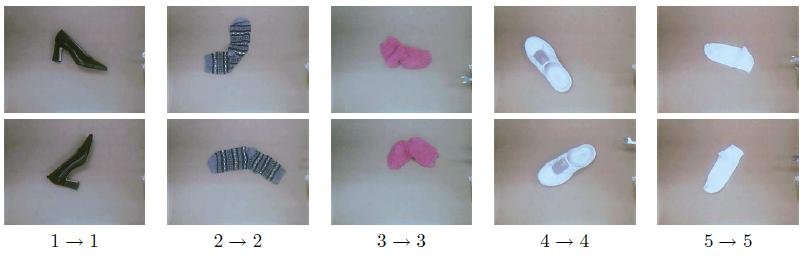
Results from matching query images obtained during a second run of
the system (top) with database images gathered during the first run (bottom) for the sorting experiment. There is
one mistake.
|
|
|
Publications
Acknowledgements
This research was supported by the U.S. National Science
Foundation under grants IIS-1017007, IIS-0844954, and IIS-0904116.