Menu
Home
CECAS Home
Department Home
A-Z Index
Calendar
Campus Maps
Phonebook
Distributed Intelligence and Robot Autonomy (DIRA) Lab
Data-driven Learning and Dynamic Control for Distributed Agents
Menu
Skip to content
About Us
Projects
Videos
Publications
People
Projects
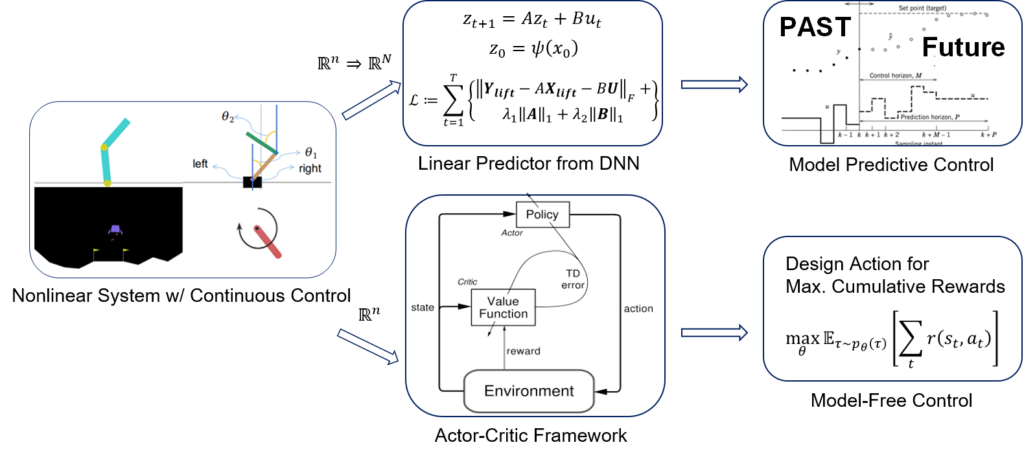
Data-Driven Control with Learned Dynamics
Deep Koopman Representation for Control