Ultra-wideband position tracking project
Ultra-wideband (UWB) indoor positioning works by measuring range and/or
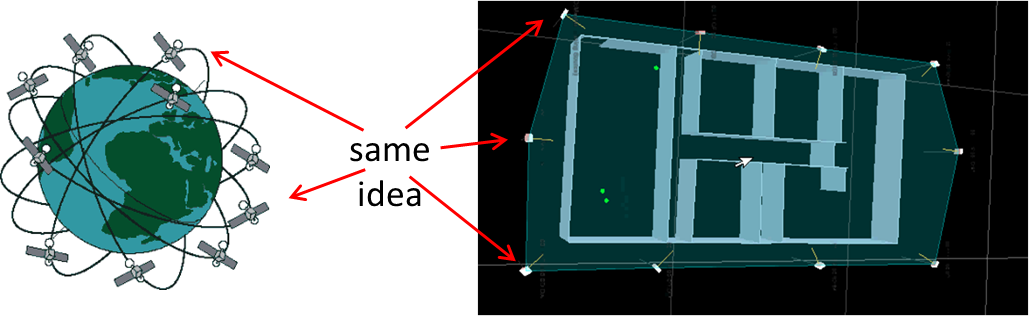
angle estimates from a set of fixed points to a moving tag.
The set of measurements is then used to calculate
position through multilateration or multiangulation.
The principle is the same as that used in the global positioning
system (GPS), except the scale is very different.
Whereas GPS works on a global scale, UWB position tracking is intended
to operate at the scale of a room or building.
The main difference is that operating indoors requires non-line-of-sight
propagation of the radio signals. This introduces many problems that
reduce the accuracy of the tracking.
In this project, we are focused on modeling the noise sources and
mitigating their effects via Kalman and particle filtering.
See my course
ECE 854 for background mathematics on these subjects.
Papers about this project:
-
W. Suski, S. Banerjee and A. Hoover,
Using a Map of Measurement Noise
to Improve UWB Indoor Position Tracking",
in IEEE Trans. on Instrumentation and Measurement,
vol. 62 no. 8, Aug 2013, pp. 2228-2236.
-
S. Banerjee, W. Suski and A. Hoover,
"Identifying and Filtering Noise
Caused by Sensor Set Switching in UWB Indoor Position Tracking",
in Int'l Journal of Ultrawideband Communications and Systems,
2014, vol. 3 no. 1, pp. 8-18.
-
B. Suski, S. Banerjee and A. Hoover,
"System-Level Noise of an Ultra-Wideband Tracking System",
in the proc. of 11th Int'l Conf on Information Science,
Signal Processing and their Applications, July 2012.
-
S. Banerjee, B. Suski and A. Hoover,
"Sensor Set Switching Noise in
UWB Indoor Position Tracking",
in the proc. of IEEE Int'l Conf on Ultra-Wideband, Sept 2012.
-
Bill Suski,
"A Study of Environment Noise in Ultra-Wideband Indoor Position
Tracking", PhD dissertation, Electrical & Computer Engineering
Dept, Clemson University, May 2012.
Defense slides.
-
Salil Banerjee,
"Improving Accuracy in Ultra-Wideband Indoor Position Tracking
through Noise Modeling and Augmentation",
PhD dissertation, Electrical & Computer Engineering Dept, Clemson
University, December 2012.
Defense slides.
Hardware:
Our research uses a UWB system manufactured by
Ubisense.
In our installs we have found the core accuracy of their system
to range from 20-100 cm.
Our techniques can improve this accuracy and we continue to
try to push the limits.
UWB Project Page / Clemson / ahoover@clemson.edu