Design and Analysis of Rigid Flex PCB Robots for Extreme Impact Resistance
Drive By Health Monitoring Using Bayesian Model Updating
Buckling Restrained Braced (BRB) Frames in Precast Structures: Initial Investigation of Connection Behavior
Lightweight Grout
End-to-End Validation and Verification of Autonomy-Enabled Ground Vehicles
Reinforced-Concrete
Buckling-Restrained Brace for Precast
Concrete Lateral-Load-Resisting Frames
Design and Analysis of Rigid Flex PCB Robots for Extreme Impact Resistance
Sponsor: South Carolina Space Grant Consortium
Students: John Bell and John Crowder
Collaborators: Kalind Carpenter, NASA Jet Propulsion Laboratory and Dr. Jean-Pierre de la Croix, NASA Jet Propulsion Laboratory


Overview
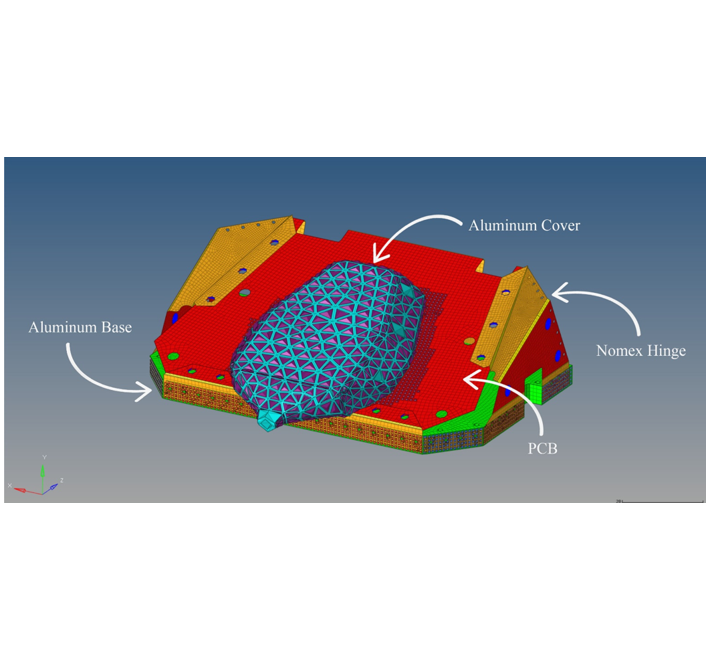
Innovation in small scale spacecraft is rapidly increasing the cadence of flight opportunities for small science payloads. Recently developed rigid-flex printed circuit board (PCB) robots, like NASA JPL’s PUFFER (Pop Up Folding Flat Explorer Robot),can leverage these flight opportunities to accomplish high-risk science objectives. Rigid-flex PCB robots utilize the PCB for both mechanical functionality and primary structure reducing the overall system mass. Rigid-Flex PCB robots can also fold in order to reduce their storage volume during launch. The ability to fold during operation permits rigid-flex PCB robots to access difficult terrain, to reduce power consumption, and to control science instruments. The objective of this project is to create the necessary analytical tools to assess the dynamic performance of rigid-flex PCB robots, validate the models with physical tests, and design new rigid -flex PCB robotics capable of extreme impact resistance.
Accomplishments
Our research team has successfully created a computationally efficient FE modeling methodology for Rigid-flex PCB robotics validated with modal testing of NASA JPL’s PUFFER. The model is capable of implementation in both implicit and explicit analysis and has been used for preliminary characterization of impact performance of the PUFFER system and to suggest modifications for improving impact resistance. Extensive vibrational testing has also been conducted to characterize the nonlinear characteristics of rigid flex PCB robotics and to suggest the most appropriate testing methods for this class of flexible robots.
Ongoing Work
Current work includes test validation of the impact modeling methodology through drop tower testing, studying alternative origami configurations, novel hinge materials, and lightweight structural reinforcement to enable extreme impact resistance of Rigid-flex PCB robotics.
Drive By Health Monitoring of Bridges Using Bayesian Model Updating
Sponsor: National Science Foundation
Students: Robert Locke and Omar Aboudeh
Collaborators: Dr. Chris McMahan, Mathematics and Statistical Sciences Department, Clemson University. Dr. Mattias Schmid, Department of Automotive Engineering, Clemson University


Overview
A relatively new indirect health monitoring strategy known as drive-by health monitoring (DBHM) attempts to address the limitations with traditional Structural Health Monitoring (SHM) of bridges by allowing a smaller network of vehicle mounted sensors to capture dynamic data across an entire bridge. The vehicle and bridge form a coupled system, where the vehicle can both excite the bridge and detect the dynamics of the bridge within its’ own dynamic response. Because this approach is mobile and requires less equipment than direct monitoring strategies, it has the potential to be more efficient, cost effective, and less labor-intensive than traditional damage detection practices, thus seemingly making SHM a viable option for short to medium span bridges. Before DBHM can be deployed as reliable alternative or supplement to traditional damage detection practices, however, limitations with the methodologies system identification and damage detection capabilities need to be addressed. Such issues include the increased influence of noise within the vehicle response compared to the short duration bridge response, closely spaced vehicle and bridge frequencies, and excessive data required for many existing model-updating and damage detection techniques. The goal of this project is to assess the feasibility of employing DBHM on short span bridges, characterize the effectiveness of various post-processing techniques to reduce noise in DBHM field data, and propose new physics-based Bayesian model-updating and damage detection techniques leveraging high-fidelity FEMs with realistic operational and environmental noise.
Accomplishments
Our research team has demonstrated the feasibility of detecting the dynamic properties of short span bridges via drive by health monitoring with passenger vehicles through physical testing. In addition, post processing techniques for DBHM data have been proposed to minimize the effects of environmental noise and closely-spaced vehicle and bridge frequencies. The team has also created a novel Bayesian estimation technique to update a coupled vehicle-bridge FEM for the purposes of SHM. Unlike existing AI based techniques, the proposed approach makes intelligent use of an embedded FEM model, thus reducing the parameter space while simultaneously guiding the Bayesian model via physics-based principles. Finally, new damage models for frozen bearings that incorporate thermal effects have been created to incorporate into high-fidelity FEMs embedded in the Bayesian damage detection models.
Ongoing Work
Current work includes assessment of additional post-processing techniques to improve the detection of short span bridge frequencies in DBHM data, the incorporation of additional sources of environmental noise (road roughness, thermal effects, etc.) into the Bayesian damage detection technique, and creating 3D coupled vehicle-bridge models to expand the types of damage that can be detected using the proposed technique.
Buckling Restrained Braced (BRB) Frames in Precast Structures: Initial Investigation of Connection Behavior
Sponsor: Precast/Prestressed Concrete Institute
Student: Hannah Kessler


Overview
Buckling-restrained braced (BRB) frames are a relatively new technology that has the potential to expand the market share of precast construction in seismic zones. Currently moment frames and shear walls are in common use as lateral force resisting systems (LRFS) in precast construction; these LFRS include cast-in-place elements, post-tensioned connections and/or grouted connections. The proposed BRB concept for precast buildings aims to simplify connections and reduce weight of the LFRS, while also providing sufficient strength and ductility.
Recently buckling-restrained-braces (BRB) have been used as the LRFS for a precast structure in the New Madrid seismic zone. The use of BRBs eliminated the necessity for moment connections in the precast structure while providing sufficient load capacity and seismic drift levels which satisfied ASCE 7. The use of BRBs with the precast system had to be justified by the designer to local building authorities because BRBs have not been widely researched for applications in precast structures and because there is currently no codified procedure by which to design them. If the use of BRB in precast frames were codified, it would greatly increase the viability of precast construction in seismic zones.
This project will examine the application of BRB’s to precast concrete with an objective of experimentally testing connections that would function with the braces to characterize their performance. The results of the experiments will also demonstrate the relative load distributions between the column and the beam through the connection to inform the precast structure and connection design/detailing.
Accomplishments
Our research team has successfully completed the initial design and fabrication of the first scaled precast beam/column and connection. We have completed pretests of simultaneous actuator control and hysteresis loops with steel specimen and monitored slip at various points in the frame. The concrete specimen, instrumentation, and speckling for the Digital Image Correlation system is now in place to begin testing.
Ongoing Work
Testing of the concrete specimen to commence shortly, and results will be forthcoming.
Lightweight Grout
Sponsor: National Concrete Masonry Association (NCMA)
Students: Rumi Shrestha and Hannah Kessler
Collaborators: Prasad Rao Rangaraju, Clemson and Jason Thompson, NCMA




Overview
Lightweight aggregates are used in concrete design to reduce structural mass, increase fire resistance, achieve better thermal performance, and provide internal curing that reduces shrinkage cracking. Masonry grouts composed of lightweight aggregates would similarly benefit reinforced masonry construction. Reductions in mass for reinforced masonry buildings would be highly desirable in seismically active regions. Increased stringency of the energy codes has made it more difficult for CMU construction to satisfy energy requirements, and the use of lightweight grouts could greatly improve R-values for grouted masonry walls, allowing them to more easily satisfy energy building code requirements.
Lightweight aggregates are used in concrete design to reduce structural mass, increase fire resistance, achieve better thermal performance, and provide internal curing that reduces shrinkage cracking. Masonry grouts composed of lightweight aggregates would similarly benefit reinforced masonry construction. Reductions in mass for reinforced masonry buildings would be highly desirable in seismically active regions. Increased stringency of the energy codes has made it more difficult for CMU construction to satisfy energy requirements, and the use of lightweight grouts could greatly improve R-values for grouted masonry walls, allowing them to more easily satisfy energy building code requirements.
Accomplishments
Our research team has successfully completed the mix design process for two different grout mixes one with an expanded clay and one with expanded slate. We have completed modulus of rupture testing, and tension testing of the bent-bar anchors and construction is complete for the shear tests specimens for bent-bar anchors, the lap-splice specimens, and the masonry shear test specimens.
Ongoing Work
The final test programs should be complete summer 2021 and results will be forthcoming.
End-to-End Validation and Verification of Autonomy-Enabled Ground Vehicles
Sponsor: U.S. Army DEVCOM GVSC
Student: Stephen Wright
Collaborators: Atul Kelkar, Cameron Turner, John Wagner, and Yue (Sophie) Wang: Clemson University and Matt Castanier: U.S. Army DEVCOM GVSC
Overview
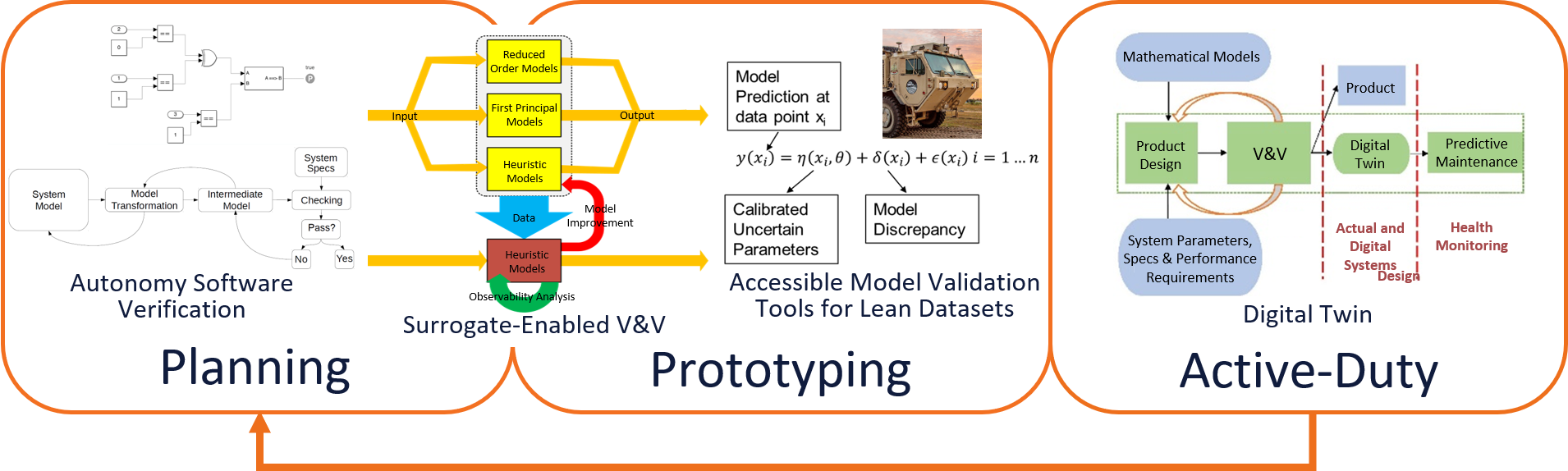
To facilitate rapid virtual prototyping of autonomy-enabled ground vehicles, validation and verification (V&V) processes must be created that ensure the accuracy and suitability of rapidly deployable computer models through digital and physical datasets. In addition, the availability of digital twin tools will empower engineers in the analysis of product design and requirement changes on mission objectives and system performance throughout the lifecycle.
To facilitate rapid virtual prototyping of autonomy-enabled ground vehicles, validation and verification (V&V) processes must be created that ensure the accuracy and suitability of rapidly deployable computer models through digital and physical datasets. In addition, the availability of digital twin tools will empower engineers in the analysis of product design and requirement changes on mission objectives and system performance throughout the lifecycle.
The technical approach can be divided into several research tasks that span across the life cycle of an autonomy-enabled ground vehicle as shown in Figure 1. Starting in the planning phase, the team has outlined an approach for verification of autonomy software utilizing formal verification methods, of which there is limited research to date. The next task spanning the planning and prototyping phases is surrogate-enabled V&V which aims to leveraging surrogate modeling techniques that will ultimately help inform resource-efficient test planning tools. The third task within the prototyping phase is accessible model validation methods for lean datasets. The proposed validation tool leverages Bayesian methods to provide quantitative data regarding model validation and better inform the decisions made based on vehicle model outputs. The final task within the active-duty phase is creation and application of a digital twin to enable exploration of design and operating issues throughout the product lifecycle.
Distribution A. Approved for public release; distribution unlimited. (OPSEC 5150)
Ongoing Work
Project task started in Fall 2020, status updates and accomplishments will be posted following OPSEC review.