Vehicle State and Parameter Estimation
by Shuonan Xu, Clemson Automotive Engineering Graduate Student
- Basic Description
-
A lack of information about the vehicle state and parameters presents a major obstacle for the development of vehicle control systems. The effectiveness of vehicle stability control largely depends on the accuracy of the vehicle state parameters, especially the slip angle and yaw rate. Currently yaw rate can be measured using a yaw rate sensor. However, information about the slip rate has to be acquired through complicated methods such as state estimation and/or GPS positioning. Of these two methods, state estimation is simpler and more economical than the GPS method. Though some state parameters can be measured by sensors directly, the state estimation method is also able to dramatically reduce errors introduced by measurement and process noise contained in the signal.
Currently most of the vehicle state estimators employ Kalman algorithms and use a generic Kalman Filter for estimation based on a linear vehicle model. The Extended Kalman Filter (EKF) and its improved algorithms can be used for non-linear vehicle models. However, in the estimation process, the EKF algorithm must solve a complicated Jacobian matrix, which can be difficult to accomplish in real time and thus increases the chances of failure. The Unscented Kalman Filter (UKF) algorithm is based on the Unscented Transformation. It calculates an approximate estimate of the Probability Density Function. The precision and real-time capabilities of this UFK surpass those of the EKF.
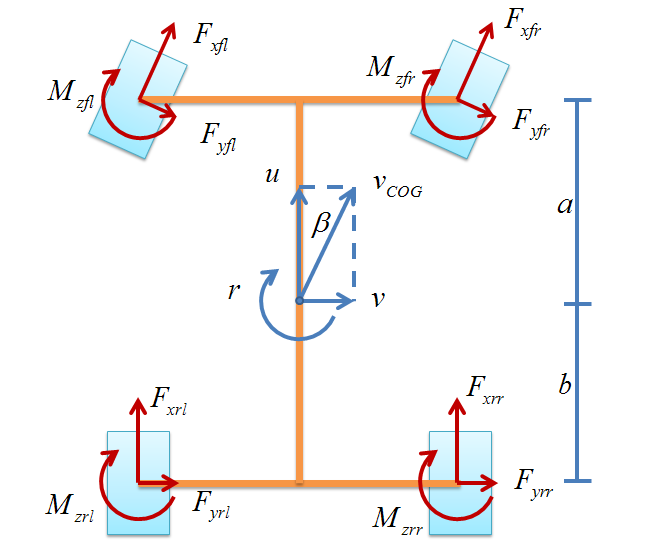
Generally, the estimation method for vehicle state and parameter estimation is based on a 7-DOF vehicle model. The 7 DOFs are lateral, longitudinal, yaw and the rotation of the four tires. This vehicle dynamics model is represented as follows:
-
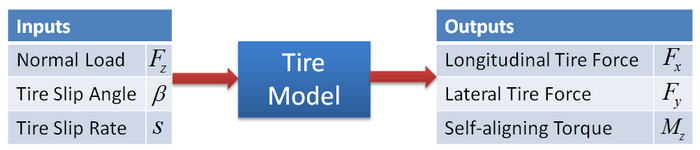
Besides the vehicle dynamics model, a reliable tire model is also essential for accurate estimation. Currently, frequently used tire models in this field include the Fiala Tire Model, the Pacejka 89 Tire Model and so forth. Taking the Pacejka 89 Tire Model as an example here, as shown in the figure below, the input parameters of this model are Normal Load, Tire Slip Angle and Tire Slip Rate, while the output parameters are Longitudinal Tire Force, Lateral Tire Force and Self-aligning Torque.
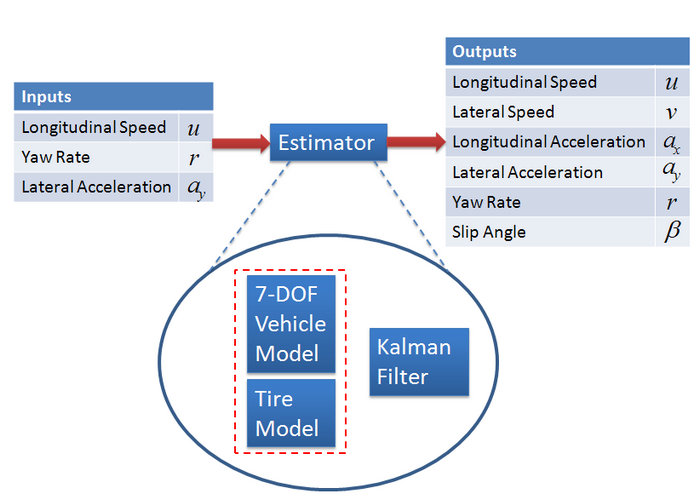
 An integrated vehicle state and parameter estimator consists of three parts: Vehicle dynamic model, tire model and filter (Kalman Filter, Extended Kalman Filter, etc.). The input parameters for the estimator are longitudinal speed, yaw rate and lateral acceleration, which can be acquired by the vehicle speed sensor, yaw rate sensor and acceleration sensor. The output parameters of the estimator are longitudinal speed, lateral speed, longitudinal acceleration, lateral acceleration, yaw rate and slip angle. Lateral acceleration and slip angle are key input parameters for active safety systems such as electronic stability control.
-
-
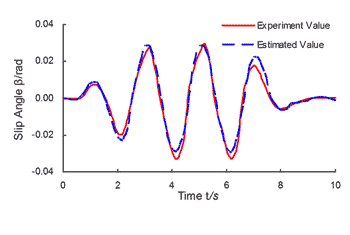
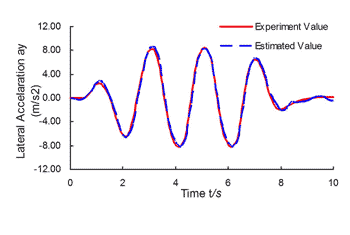
Below are two graphs of estimation results for slip angle and lateral accelaration. We can see from these two graphs that the estimator can provide good estimates of key vehicle parameters. Currently, vehicle parameter and estimation technology is still being developed. Some recently developed filters, such as the Particle Filter can also be integrated with the estimator. This technology can be used in the field of tire-road friction coefficient estimation and has great development protentail.
-
- Sensors
- Vehicle speed sensor, Yaw rate sensor, Acceleration sensor
- For More Information
- [1] Vehicle State Estimation with GPS , project description, Stanford Dynamic Design Lab.
- [2] Vehicle State Estimation Using Steering Torque, P. Yih, et al., Stanford University.
- [3] Kalman Filter, Wikipedia.
- [4] Hans B. Pacejka, Wikipedia.
- [5] Full Vehicle Dynamic Modeling for Chasis Controls, J. Lee et al., F2008-SC-021, Kookmin University.
|