Funded Projects CuRL
Dexterous Robotic 3D Cement Hoses Funded by NSF
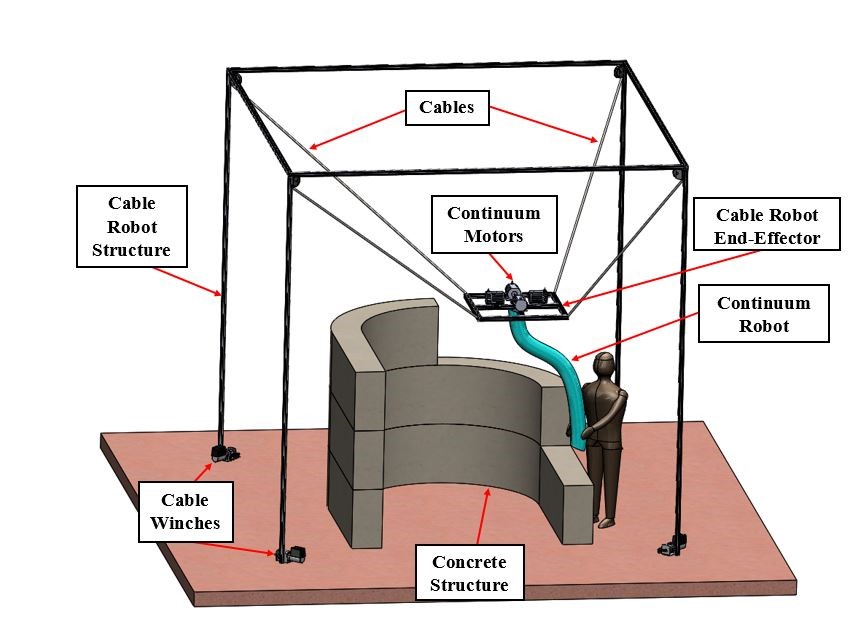
We are developing innovative solutions for dexterously deploying
hoses in congested spaces. The research, supported by the U.S. National Science Foundation, is
focused on a novel application: 3D printing of concrete. The proposed concrete deployment robot
system will be based on a new cable-driven macro/micro design, featuring an under-actuated
cable-robot as the macro unit, and a cable-driven continuum robot, integrated with the concrete
delivery hose, as the micro unit. See concept image. The research is in collaboration with
colleagues at Clemson in Civil Engineering and Automotive Engineering.
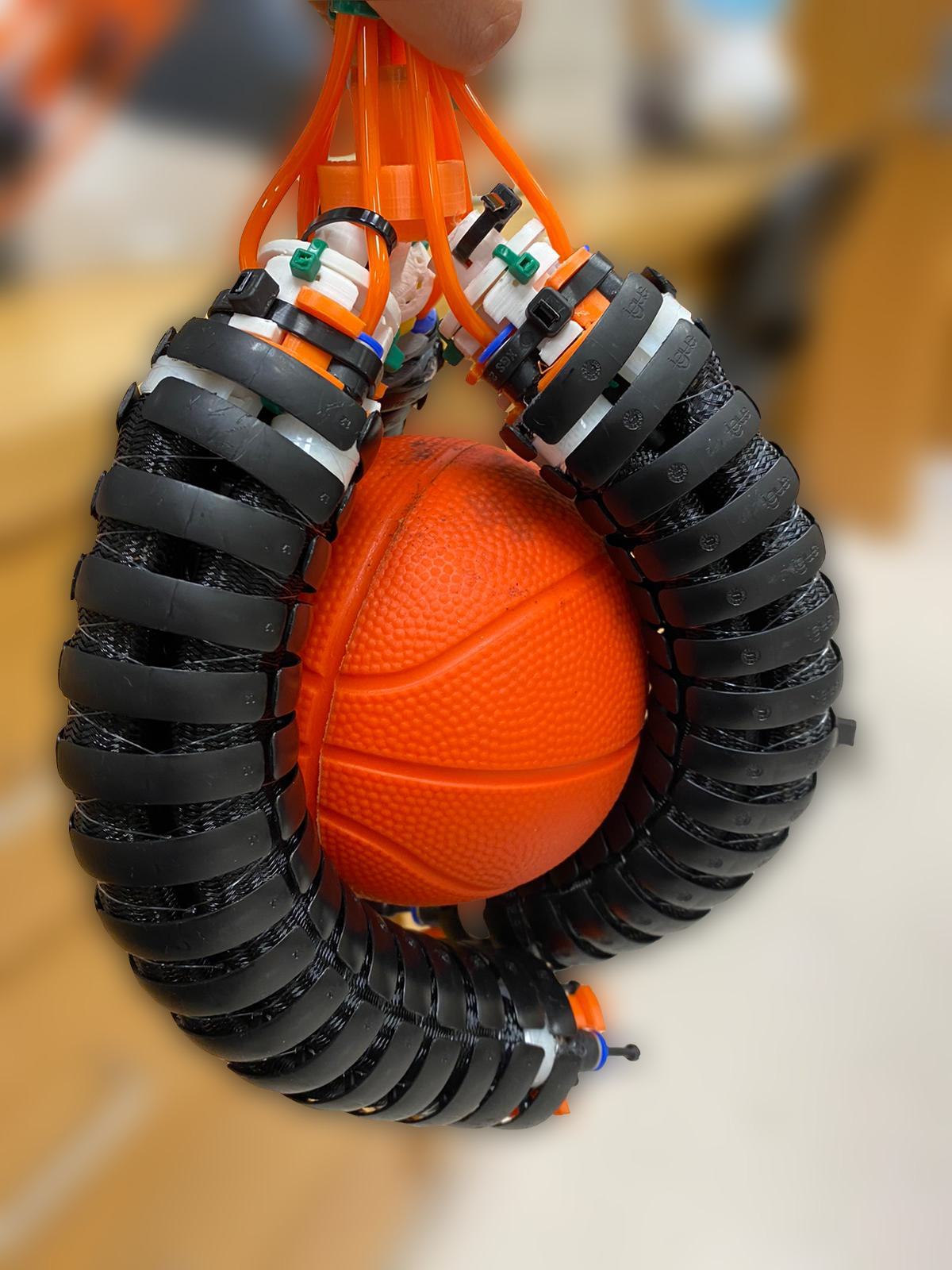
Our group is adapting commercial cement hoses to remotely actuate them using tendons to
dexterously locate them for concrete delivery as needed. See images. This research involves
innovations in the design and modeling of continuum robots.


Publications
P. Sterckx and I.D. Walker, “Modeling and Design Optimization of Robotic Hoses for
3D Printing of Cement”, Proc. ASME International Mechanical Engineering Congress
and Exposition (IMECE), Portland, OR (Online), November 2020, pp. V006T06A038-1-6.
Modular Continuum Robots Funded by NSF
We are conducting fundamental research into modular robots containing "soft"
continuous-backbone continuum elements. The goal is to investigate the potential
of reconfigurable soft robots, with robotic configurations assembled for manipulation
and locomotion using soft modules. We are asking fundamental questions regarding
the issue of how “hard”, or how “soft”, components of future robot systems should be.
Via several focused research thrusts centered on novel modular robots featuring
compliant and/or soft elements, we are investigating basic issues underlying the
design, modeling, and operation of robots featuring both “stiff/hard” and “soft”
components. The wider goal is to enable fundamental advances in the applicability
of modular, continuum, and soft robots. This work is funded by the U.S. National
Science Foundation, and is in collaboration with researchers at DePaul University
and Vanderbilt University.
At Clemson, our group's research focuses on manipulation, specifically novel
design of structures featuring continuum modules, and related fundamental research
in modeling of continuum robotic elements. See images.
Publications
I.S. Godage, Y. Chen, K. Galloway, E. Templeton, B. Rife, and I.D.
Walker, “Real-time Dynamic Models for Soft Bending Actuators”, Proc.
IEEE International Conference on Robotics and Biomimetics (ROBIO), Kuala
Lumpur, Malaysia, December 2018, pp. 1310-1315.
P. Gonthina, A.D. Kapadia, I.S. Godage, and I.D. Walker, “Modeling
Variable Curvature Parallel Continuum Robots Using Euler Curves”, Proc.
IEEE International Conference on Robotics and Automation (ICRA)”,
Montreal, Canada, May 2019, pp. 1679-1685.
I.S. Godage, R.J. Webster, III, and I.D. Walker, “Center of
Gravity-based Approach for Modeling Dynamics of Multisection Continuum
Arms”, Vol. 35, No. 5, IEEE Transactions on Robotics, October 2019, pp.
1097-1108.
P. Gonthina, M.B. Wooten, I.S. Godage, and I.D. Walker, “Mechanics for
Tendon Actuated Multisection Continuum Arms”, Proc. IEEE International
Conference on Robotics and Automation (ICRA), Paris, France (Online),
June 2020, pp. 3896-3902.

Plant-Inspired Tendril Robots Funded by NASA and NSF
Vines are found throughout the natural (and human-made) world. They feature robust, versatile structures with unique capabilities, allowing them to adapt to congested spaces and/or irregular terrain, significant voids, and unpredictable dynamic environmental interactions. Robots emulating the capabilities of vines could extend the reach (literally and figuratively) of robotics into new domains and applications.
Our group's research in this area covers both novel design and operation of long, thin "tendril" robots (see images) and basic research into modeling, interfacing, and control of plant-inspired continuum robots.
Publications
M.B. Wooten, C.G. Frazelle, I.D. Walker, A.D. Kapadia, and J.H. Lee,
“Exploration and Inspection with Vine-Inspired Continuum Robots”, Proc.
IEEE International Conference on Robotics and Automation (ICRA),
Brisbane, Australia, May 2018, pp. 5526-5533.
C.G. Frazelle, A. Kapadia, and I.D. Walker, “Developing a Kinematically
Similar Master Device for Extensible Continuum Robot Manipulators”, ASME
Journal of Mechanisms and Robotics, 10(2), doi: 10.1115/1.4039075, April
2018, pp. 025005-1-8.
M. Wooten and I.D. Walker, “Vine-Inspired Continuum Tendril Robots and
Circumnutations”, Robotics, 7(3), doi:10.3390/robotics7030058, September
2018., pp. 1-16.
M.C. Lastinger, S. Verma, A.D. Kapadia, and I.D. Walker, “TREE: A
Variable Topology, Branching Continuum Robot”, Proc. IEEE International
Conference on Robotics and Automation (ICRA)”, Montreal, Canada, May
2019, pp. 5365-5371.
C.G. Frazelle, A.D. Kapadia, and I.D. Walker, “A Haptic Interface for
the Teleoperation of Extensible Continuum Manipulators”, IEEE Robotics
and Automation Letters, Vol. 5, Issue 2, doi: 10.1109/LRA.2020.2970642,
April 2020, pp. 1875-1882.
J. Gallentine, M.B. Wooten, M. Thielen, I.D. Walker, T. Speck, and K.J.
Niklas, “Searching and Intertwining: Climbing Plants and GrowBots”,
Frontiers Robotics and AI, Vol. 7, Article 118, doi:
10.3389/frobt.2020.00118, August 2020, pp. 1-14.
C. Wang, C.G. Frazelle, J.R. Wagner, and I.D. Walker, “Dynamic Control
of Multi-Section Three-Dimensional Continuum Manipulators Based on
Virtual Discrete-Jointed Robot Models”, IEEE/ASME Transactions on
Mechatronics, Vol. 26, No. 2, doi: 10.1109/TMECH.2020.2999847 April
2021, pp. 777-788.
C.G. Frazelle, I.D. Walker, A. AlAttar, and P.S. Kormushev,
“Kinematic-Model-Free Robot Control for Space Operations with Continuum Robots”,
Proc. IEEE Aerospace Conference, Big Sky, MT, March 2021, pp. 1-11.
K.J. Niklas and I.D. Walker, “The Challenges of Inferring Organic
Function from Structure and its Emulation in Biomechanics and
Biomimetics”, to appear, Biomimetics, 6, 21,
https://doi.org/10.3390/biomimetics6010021 (first available online March
2021), 2021.



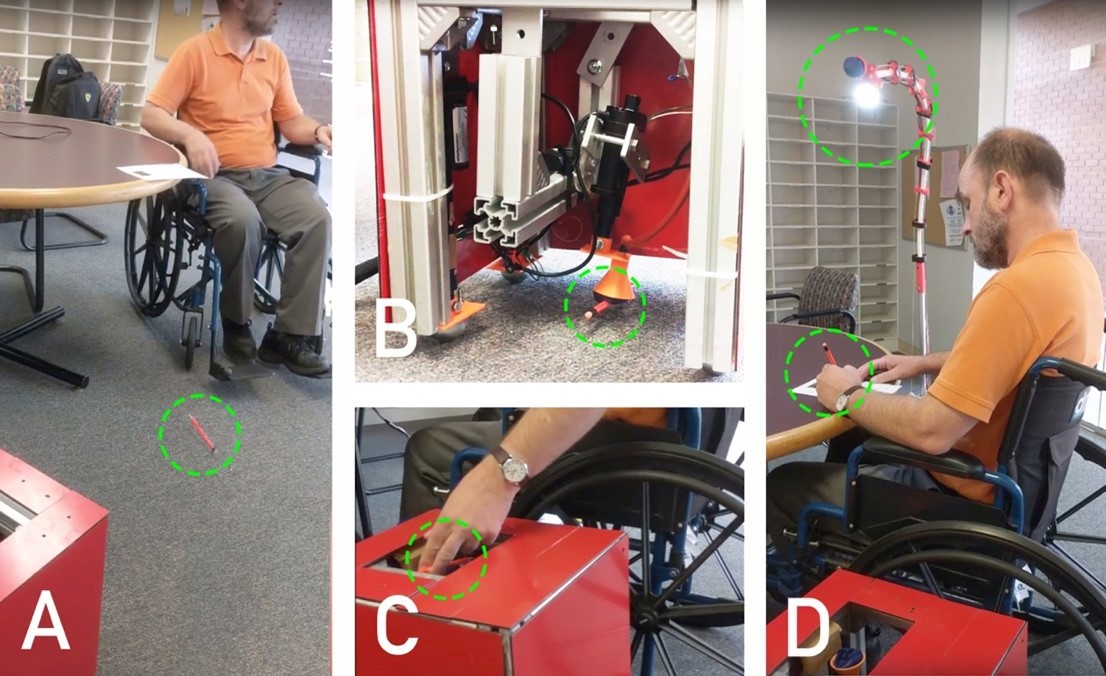
Robot Teams to Support Aging in Place Funded by NSF
With support from the U.S. National Science Foundation,
we are realizing and evaluating home+, an intelligent, physical
environment featuring a suite of collaborative networked, robotic home
furnishings distributed across any domestic interior. home+ is aimed at
increasing the quality of life of both healthy individuals and persons
with impaired mobility and cognitive functioning by intelligently
enabling their interaction across their home environment. In
collaboration with researcher at Cornell University, we are: (1)
establishing needs and wants, identifying those aspects of our
long-developing home+ concept that best promise to support independent
living; (2) iteratively co-designing and evaluating for usability a
suite of three robotic furnishings that recognize, communicate with, and
partly remember each other in interaction with human users.
The above research is part of a wider effort by our group in advancing
Architectural Robotics, defined as robots for the built environment. In
previous NSF-sponsored research, we have developed robotic workstations,
robotic versions of hospital beds, and a "robot-room" supporting early
literacy installed and evaluated in the Richland (SC) Country Public
Library.
Publications
C. De Aguiar, R. Fateminasab, C. Frazelle, R. Scott, Y. Wang, M. Wooten,
K.E. Green, and I.D. Walker, “The Networked, Robotic home+ Furniture
Suite: a Distributed, Assistive Technology Facilitating Aging in Place”,
Proc. 12th IEEE International Conference on Automation Science and
Engineering (CASE), Fort Worth, TX, August 2016, pp. 1067-1072.
S. Verma, P. Gonthina, Z. Hawks, D. Nahar, Y. Wang, C. de Aguiar, J.O.
Brooks, I.D. Walker, and K.E. Green,“Design and Evaluation of Two
Robotic Furnishings Partnering with Each Other and Their Users to Enable
Independent Living”, Proc.12th EAI International Conference on Pervasive
Computing Technologies for Healthcare, ACM, New York City, NY, May 2018,
pp. 35-44.
Y. Wang, C. Frazelle, R. Sirohi, L. Li, I.D. Walker, and K.E. Green,
“Characterization of a Novel Robotic Surface for Application to
Compressed Physical Environments”, Proc. IEEE International Conference
on Robotics and Automation (ICRA)”, Montreal, Canada, May 2019, pp. 102-108.
R. Sirohi, Y. Wang, S. Hollenberg, I.S. Godage, I.D. Walker, and K.E.
Green, “Design and Characterization of a Novel, Continuum-Robot Surface
for the Human Environment”, Proc. IEEE International Conference on
Automation Science and Engineering (CASE), Vancouver, Canada, August
2019, pp. 1169-1174.
Z Hawks, M.S. Islam, M. Lastinger, H. Rutland, M. Trout, I.D. Walker,
and K.E. Green, “Robots in the Home: A Novel Suite of Interactive
Devices for Assisting with Disease Prevention and Meal Preparation”,
Proc. IEEE Global Humanitarian Technology Conference, Seattle, WA,
October 2019, pp. 715-718.
Z. Hawks, C. Frazelle, K.E. Green, and I.D. Walker, “Motion Planning for
a Continuum Robotic Mobile Lamp: Defining and Navigating the
Configuration Space”, Proc. IEEE/RSJ International Conference on
Intelligent Robots and Systems (IROS), Macao, China, November 2019, pp.
2559-2566.