To achieve the vision of Dynamic Matter, we have established three different research thrusts. Here we will briefly discuss their objectives, intellectual merits, and potential impacts, starting from the most mature and well-funded thurst to and ending at the newest one that is still in its infancy.
Harnessing the Geometry of Origami and Kirigami to Create Multi-Functional Matters
Since their creation many centuries ago, kirigami and origami have gone through explosive evolutions in their beauty and complexity. The seemingly infinite possibilities of developing 3D geometries via folding and cutting have inspired many engineering systems that are starting to shape our aerospace, architecture, robotics, and bio-medical industries. However, current state-of-the-art primarily focuses on exploiting the kinematics (or geometry) of folding and cutting without considering the elastic deformations or dynamic responses. Therefore, we are just scratching the surface of potentials offered by infusing these inspiring arts into engineering. Our first research thrust aims to complete a paradigm shift from just exploiting the kinematics of kirigami and origami to systematically harnessing their mechanics and dynamics. This thrust currently consists of three inter-related research topics.
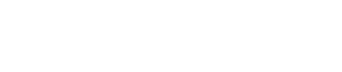
Uncover the Dynamics of Origami Folding :: Traditionally, origami folding is considered a static process. This topic challenges this notion and examines the dynamics of folding. How can reciprocal folding induce desirable dynamic behaviors? How can dynamic inputs activate rapid self-folding?
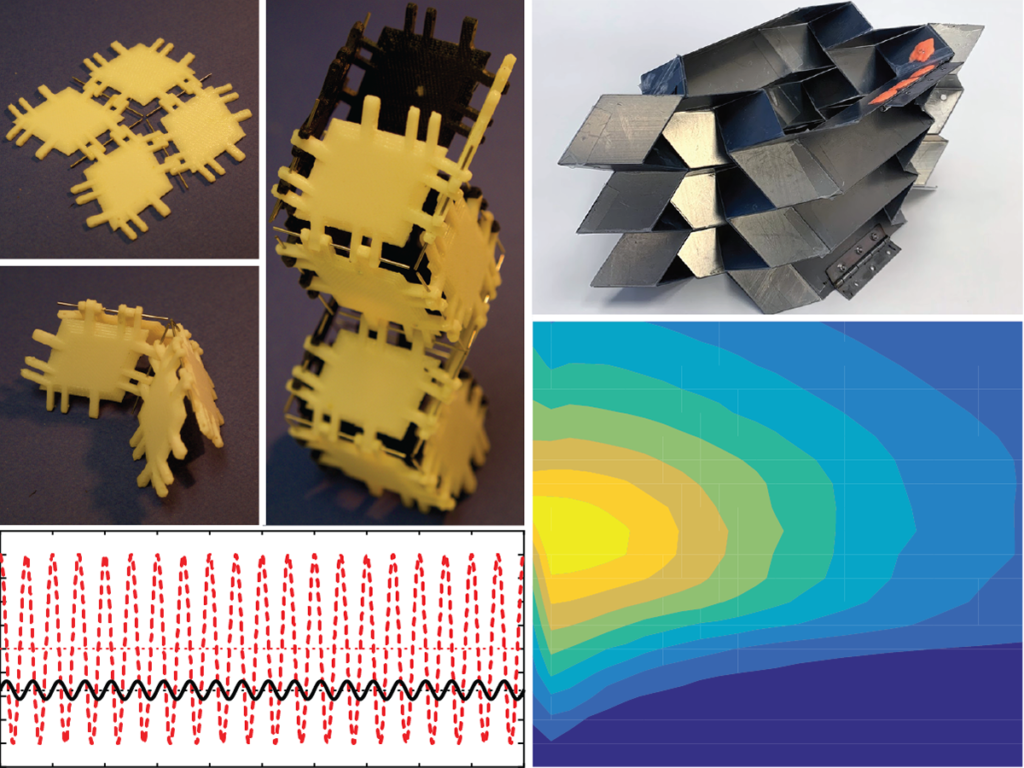
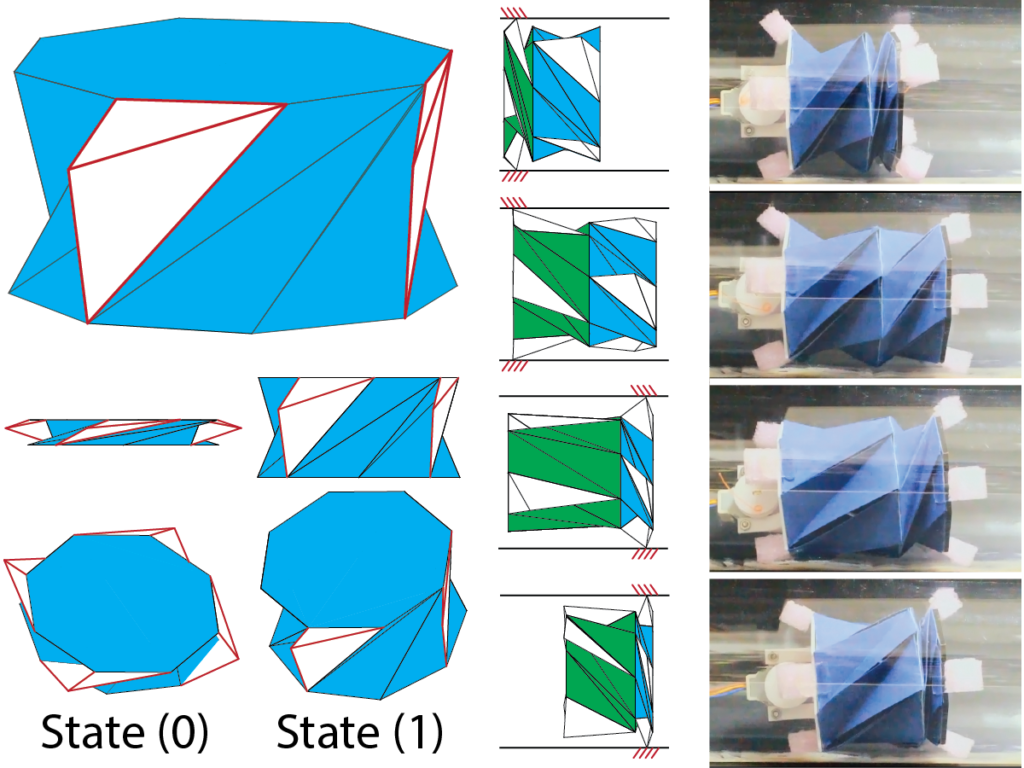
Explore the Three-Dimensional Multi-Stablity in origami :: Multi-stablity a catalyst for synthesizing multi-functional structures and material systems. This topic aims to advance our study of these multi-stable systems from low-dimension to truly three-dimensional domain by leveraging the folding kinematics.
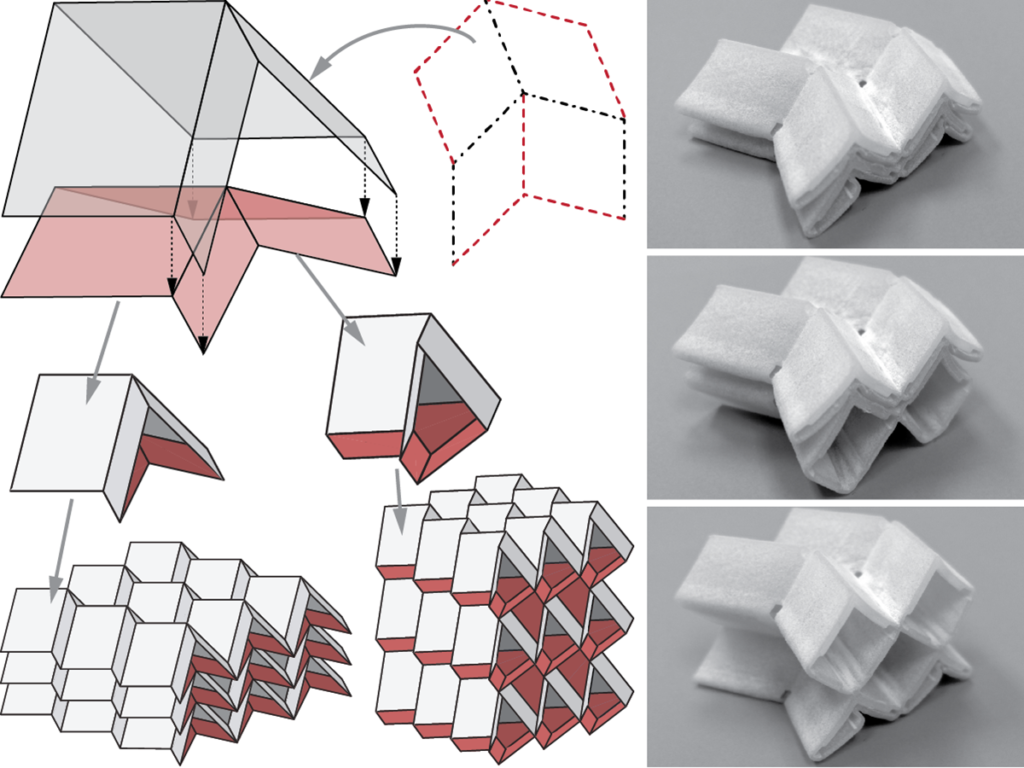
Insert Kirigami Cutting into Adaptive Composites :: Adaptive composite structures with asymmetric fiber layouts have shown promising potentials in shape morhing. This topic seeks to infuse the principle of Kirigami cutting to fundametnally expand their available performance space and functionality.
Exploiting Nonlinear Mechanics to Engineer Robotic Matters with Mechanical Intelligence
The ongoing advances in bio-mimicry, material science, fabrication technology, and control theory are enabling us to build genuinely soft robots that can collaborate with humans in unstructured and dynamic tasks such as in disaster relief, minimal-invasive surgeries, and assistive healthcare. However, the compliant and continuous nature of soft robots also imposes a formidable challenge of effective modeling and control. Therefore, this research aims to complete a paradigm shift in how we understand and use the “softness” in a robotic body. That is, instead of passively coping with the difficulties imposed by material softness, we aim to formulate a new approach to proactively prescribe and exploit nonlinear material properties for robotic tasks. In this way, we can directly “outsource” the low-level control tasks to the robotic body and formulate a hybrid mechanical-digital approach for control. This thrust currently consists of two inter-related research topics.
Locomotion Coordination Without Digital Controllers :: A soft robot consists of several modules with non-monotonic force-deformation relationship can exhibit a complex deformation sequence with a simple actuation input. By carefully designing this sequence, one can eliminate the need to use digital controllers to achieve coordinated locomotion like peristalsis crawling.
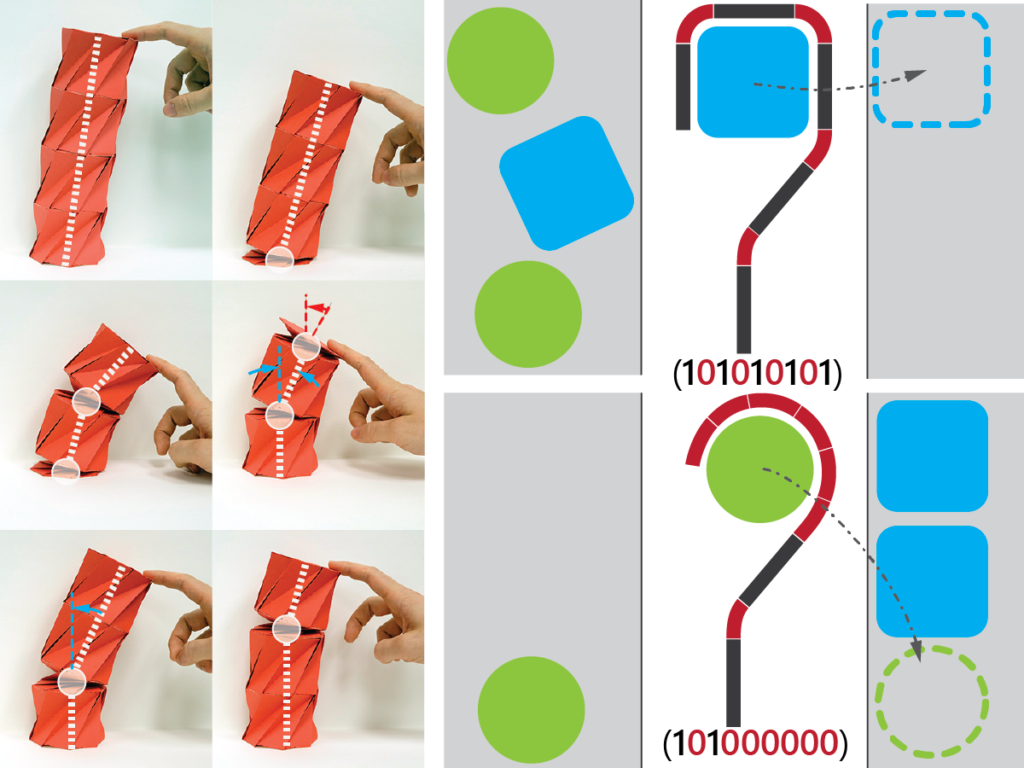
State-Space Reconfiguration using Multi-Stability :: A multi-stable structure can exhibit radically different mechanical properties at different states, so we can use it to distribute and reconfigure the property distribution throughout the soft robot body. By exploiting this, we can reconstruct the state space (e.g. degrees of freedom) of a continuous manipulator on-demand.
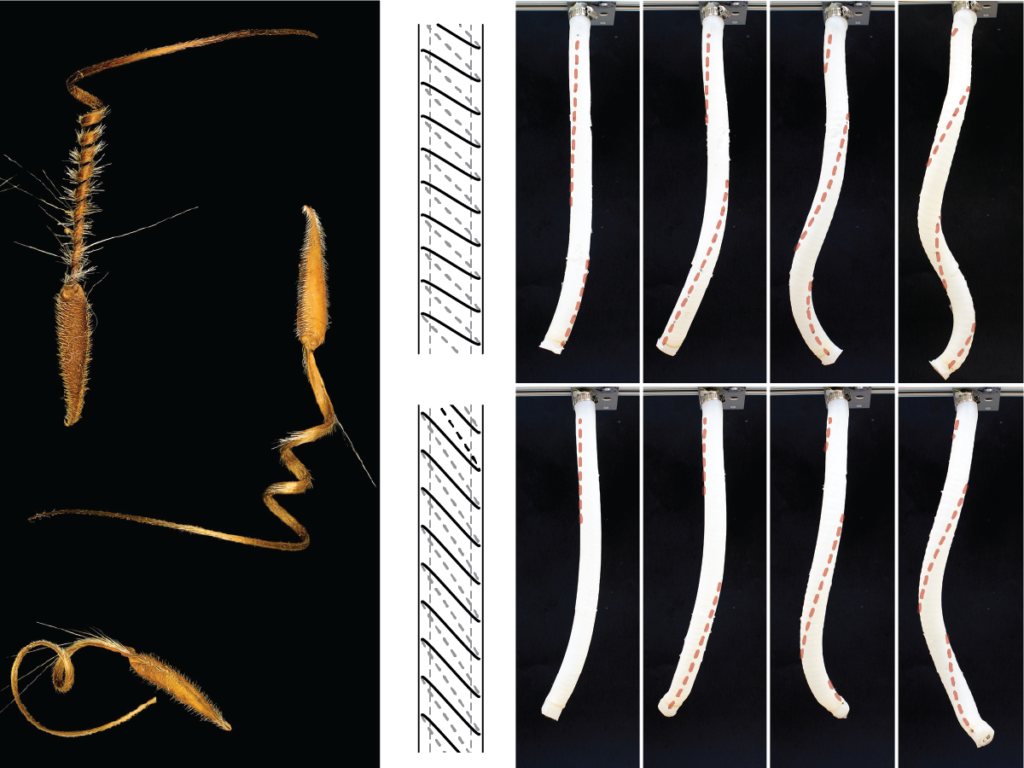
Learning from plants and their unique "intellegence" :: In our popular belief, plants are static and immobile, but this couldn’t be further from the truth. Plants are capable of achieving many sophisticated motions, and they even exhibt intelligent behaviors. We aims to explore the physiology of plant motion and intelligence to create a new family of robots.
External Fundings
Since joining Clemson in 2016, Dr. Li has secured 1.8 million research fundings from the National Science Fundations to support our research in the dynamic matter.
- “ Exploiting Multi-Stability to Enable Mechanical Intelligence for Versatile and Efficient Control of Soft Robotic Locomotion and Manipulation”, CMMI-1933124 (DCSD Program), Role: Lead-PI, Date 09/01/2019-08/21/2022, $275,894 (100%).
- “Establishing a Design Framework for Multi-functional Composites by Leveraging Kirigami Cutting, Multi-stability, and Multi-level Optimization”, CMMI-1760943 (ESD Program), Role: Lead-PI, Date: 08/07/2018-08/31/2021, $715,182 (40%).
- “CAREER: Leveraging the Three-Dimensional Multi-Stabilityfrom Origami Folding to Synthesize Multi-Functional Material Systems”, CMMI-1751449 (MOMS Program), Role: PI, Date: 05/01/2018-04/30/2023, $598,569 (100%).
- “Collaborative Research: Uncovering the Dynamic Characteristics and Functionality of Generic Origami Structures and Materials” CMMI-1633952 (DCSD Program), Role: PI, Date: 09/01/2016-08/31/2019, $192,604 (100%).