Effects of back-support exoskeleton use on gait performance and stability during level walking
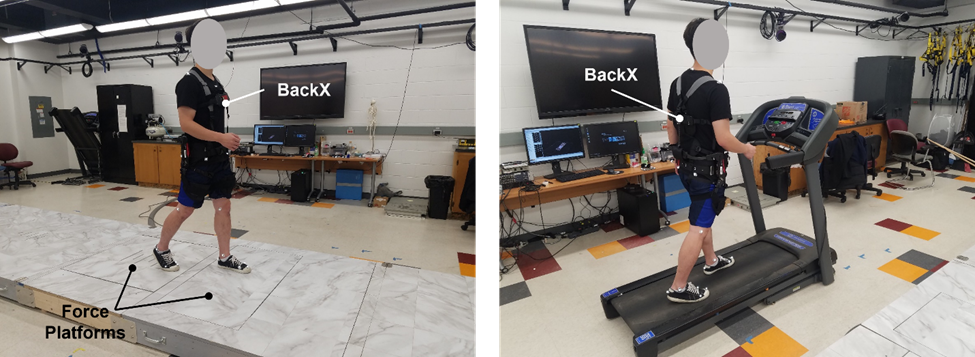
Back-support exoskeletons (BSEs) are a promising intervention to mitigate physical demands at work. Although growing evidence indicates that BSEs can reduce low-back physical demands, there is limited understanding of potential unintended consequences of BSE use, including the risk of falls. Thus, we aimed to investigate the effects of BSE use on gait performance and stability during level walking. Twenty participants (10M, 10F) completed five level over-ground walking trials and a five-minute treadmill walking trial while wearing a BSE (backX TM ) with three different levels of external torque (i.e., no torque, low torque, and high torque) and in a control (no-exoskeleton) condition. Spatiotemporal gait patterns, stride-to-stride gait variability measures, required coefficient-of-friction (RCoF), and minimum foot clearance (MFC) were determined, to assess gait performance. Gait stability was quantified using the maximum Lyapunov exponent (MLE) of trunk kinematics and the margin-of-stability (MoS). Using the backX TM with high supportive torque decreased slip risk (7% decrease in RCoF) and slightly improved trunk stability (3% decrease in MLE). However, it also decreased step length (1%), increased step width (10%) and increased gait variability (8-19%). Changes in MoS were complex: while MoS at heel strike decreased in the AP direction, it increased in the ML direction. There was a rather large decrease in MoS (26%) in the ML direction during the swing phase. This is the first study to quantify the effects of wearing a passive BSE with multiple supportive torque levels on gait performance and stability during level walking. Our results, showing that the external torque of the BSE may adversely affect gait step width, variability, and dynamic stability, can contribute to better design and practice guidelines to facilitate the safe adoption of BSEs in the workplace.
Effects of back-support exoskeleton use on lower limb joint kinematics and kinetics during level walking
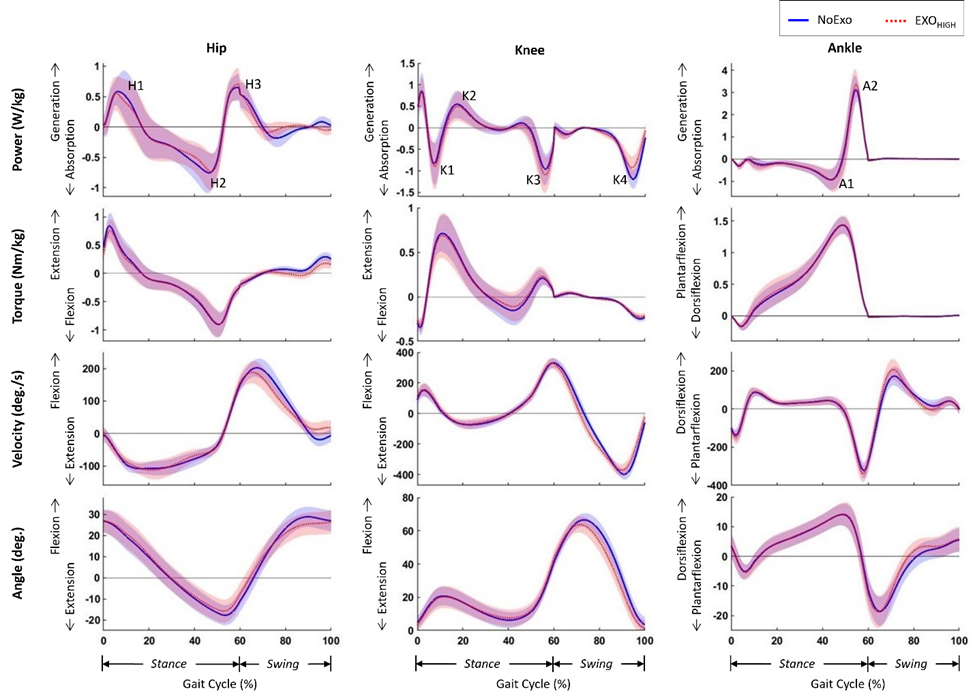
We assessed the effects of using a passive back-support exoskeleton (BSE) on lower limb joint kinematics and kinetics during level walking. Twenty young, healthy participants completed level walking trials while wearing a BSE (backXTM) with three different levels of hip-extension support torque (i.e., no torque, low, and high) and in a control condition (no-BSE). When hip extension torques were required for gait – initial 0-10% and final 75-100% of the gait cycle – the BSE with high supportive torque provided ~10 Nm of external hip extension torque at each hip, resulting in beneficial changes in participants’ gait patterns. Specifically, there was a ~10% reduction in muscle-generated hip extension torque and ~15-20% reduction in extensor power. During the stance-swing transition, however, BSE use produced undesirable changes in lower limb kinematics (e.g., 5-20% increase in ankle joint velocity) and kinetics (e.g., ~10% increase in hip flexor, knee extensor, and ankle plantarflexor powers). These latter changes likely stemmed from the need to increase mechanical energy for propelling the leg into the swing phase. BSE use may thus increase the metabolic cost of walking. Whether such use also leads to muscle fatigue and/or postural instability in long-distance walking needs to be confirmed in future work.