Active Yaw Control
- Basic Description
-
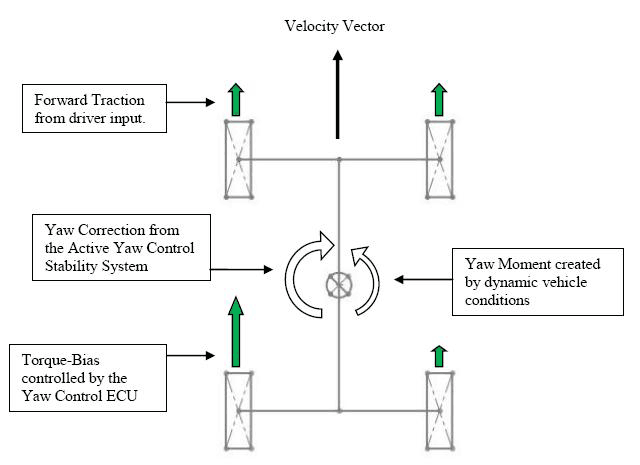
Active Yaw Control is a dynamic stability control system that sustains
longitudinal acceleration and improves lateral stability by controlling torque-bias between the rear wheels.
Active yaw control increases cornering and traction performance using a computer controlled rear differential.
The torque difference between the rear wheels generates a yawing
moment in the proper direction and corrects the yaw-dynamics of the vehicle in motion.
The result is a stable vehicle with improved handling performance and improved cornering capability. These systems are sometimes referred to as active differentials or vector drives.
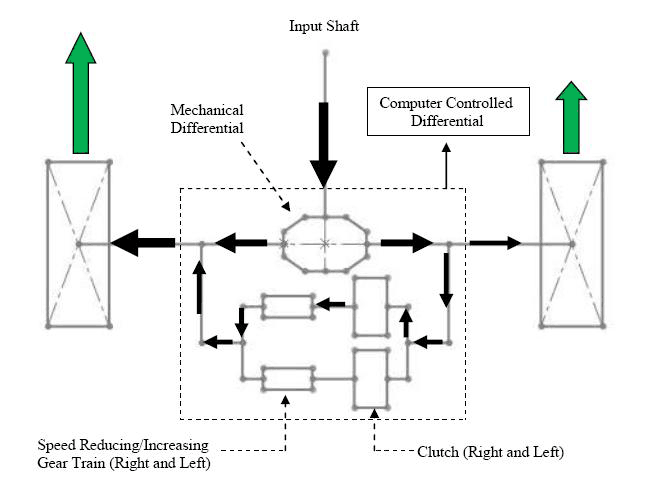
The torque variation is controlled by the ECU and is applied to the wheels through several mechanical components in the differential. The three major components in the computer controlled differential are the clutch mechanisms, the main differential, and the speed increasing/reducing gear train. The clutches are utilized to control the amount of torque being transferred through the increasing/decreasing gear train, and determine the amount of torque applied to each of the two wheels. The torque-bias is a function of clutch pressure and the amount of clutch pressure is determined by the processor in the ECU and actuated using hydraulic or electromagnetic components.
The active yaw control strategy is based on the relative wheel speeds. The optimum wheel speed difference is determined by the ECU in order to maintain the steering wheel position.
If a vehicle with active yaw control begins to rotate in a manner inconsistent with the steering wheel position, torque from the outside wheel will be transferred to the inside wheel. This torque difference will produce a yawing motion in the direction necessary to correct the car's rotation.
The active yaw control system should not be confused with the electronic stability control (ESC) system which also provides dynamic stability control to the vehicle. ESC systems brake individual wheels of the vehicle in order to control yaw moment to improve handling performance and cornering capability. Though stability is achieved, the vehicle speed is compromised. On the other hand, AYC is a performance oriented system which distributes torque between rear wheels optimally in such a way that it utilizes maximum available traction.
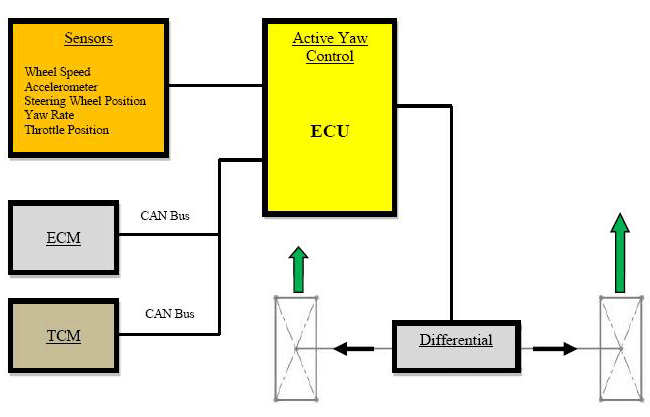
- Sensors
- Wheel speed, accelerometer, steering wheel position, throttle position, yaw rate
- Actuators
- Solenoids (for clutch actuation)
- Data Communications
- Control Unit Communication: Typically Control Area Network (CAN) Bus System
- Manufacturers
- Acura, Audi, BMW, Honda, Lexus, Mitsubishi, Nissan, Ricardo, Subaru, ZF
- For More Information
- [1] What is Active Yaw Control, LancerRegister.com.
- [2] Active Yaw Control, Wikipedia.
- [3] Active Differentials Share Torque between EV Wheels, Drives & Controls, June 2011.
- [4] Schaeffler Active eDifferential: The Active Differential for Future Drive Trains, Schaeffler Website.
- [5] Quattro with Sports Differential,YouTube, Mar. 8, 2010.
- [6] Mitsubishi All-Wheel Control , YouTube, Mar. 30, 2012.
- [7] Nissan All Mode 4x4i with Torque Vectoring, YouTube, Jan. 9, 2013.
- [8] A Review of Active Yaw Control ..., M. K. Aripin et al., International Journal of Vehicular Technology, June 12, 2014.
- [9] Torque Vectoring Differential - Explained, YouTube, Feb. 1, 2015.
|
