Development of Cyber-Physical Systems for Connected and Automated Vehicles (CAVs)
Grantee: Clemson University
Principal Investigator: Mashrur “Ronnie” Chowdhury
Co-Principal Investigator: Mizanur Rahman
Center Name:
Center for Connected Multimodal Mobility (C2M2)
Research Priority: Improving Mobility of People and Goods
Funding:
$395,500.00
Project Description:
The Center
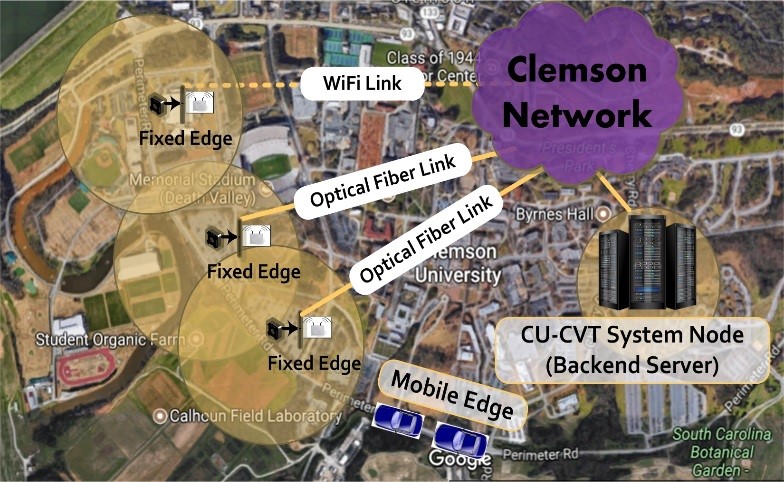
for Connected Multimodal Mobility (C2M2) has developed transportation cyber-physical systems (CPS) for connected and automated vehicles (CAVs) through this research by enhancing the
functionality of the Clemson University Connected and automated Vehicles Testbed (CU-CAVT), located in Clemson, South Carolina. The CPS for CU-CAVT has several useful features, such as layered architecture for reducing communication bandwidth requirements, diverse wireless communication mediums, data analytics that use real-time data streaming, and data archiving using Big Data software. The layered architecture reduces data delivery delay
and data loss rates, and increases data transmission rates between different layers of the CPS.
However, the benefits of connected and automated vehicles are hindered by a lack of access to real-world and real-time data from connected and automated vehicles to support the CAV applications development process. Thus, the first research focus is to develop a scalable and secure CAV application development platform (CAVDeP) that enables CAV application developers to build, debug, and test CAV applications in real time. In order to provide the right level of protection for the Vehicle-to-Infrastructure (V2I)/ Infrastructure-to-Vehicle (I2V) wireless communication interfaces of the CPS, the second research focus is on the cybersecurity of V2I and I2V communication interfaces.
A new software-based security architecture, called CVGuard, has been developed to protect CAVs in a V2I/I2V communication environment against cyber-attacks. A third research effort is focused on developing CAV applications that coordinate the exchange of data between traffic signals, vehicles, and pedestrians in real time so that vehicles can maneuver in a safe, efficient and environment-friendly manner at signalized intersections, with the aim of reducing crashes, travel time, fuel consumption, and greenhouse gas emissions.
A fourth research effort is focused on improving the safety of automated vehicles in a CPS environment through the development of a hazard detection and maneuvering approach, which can help automated vehicles to navigate safely during unexpected roadway events, whether caused by a deliberate action (e.g., roadblock) or unintentionally (e.g., debris). Special attention is being given to ensure that the technology is scalable so that it can be deployed at the local and national levels.
Outcomes/Impacts: CAV technologies will significantly reduce crashes, save fuel, reduce congestion delays, and increase roadway efficiency and cost-effectiveness. The CAVDeP platform is directly contributing to realizing these benefits by helping to move CAV technology from the lab to the road. CVGuard is providing robust security to make our connected transportation systems protected from external cyber-attacks. In addition, CAVs will be able to maneuver through unexpected events using our computer vision-based software, which will improve the public’s trust in driverless vehicles while improving passengers’ safety and comfort.
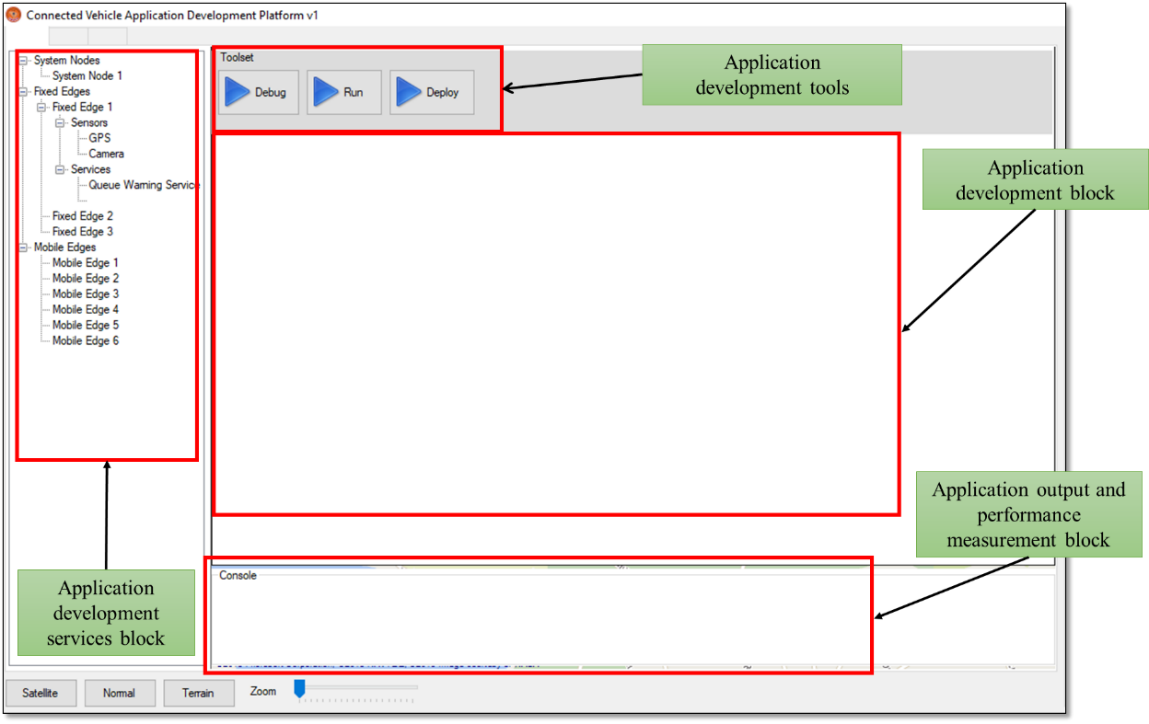
Graphical Interface of Connected Vehicle Application Development Platform
The analysis outcome proves the efficacy of CVDeP, which satisfies functional requirements (e.g., latency, throughput) of a CV application while maintaining scalability, and security of the platform and applications. As a part of foundational project, we have developed a software package for scalable and secure CAV application development platform, CAVDeP, that enables the CAV application developers to build, test, and debug CAV applications in real-time.
Sub-Project 1: Connected Vehicle Applications Development Platform (CVDeP)
Connected vehicle (CV) application developers need a development platform to build, test, and debug CV applications, such as safety, mobility, and environmental applications, in an edge-centric Cyber-Physical Systems (CPS). The major challenges for developing a CV application development platform for an edge-centric CPS are to (a) enable developer’s to collect, process, and distribute data, while running multiple CV applications concurrently in real-time in different edge layers; and (b) ensure security of the platform and application while maintaining the scalability of the platform.
We developed and evaluated a scalable and secure CV application development platform (CVDeP) that enables the CV application developers to build, test, and debug CV applications in real-time. CVDeP ensures that the functional requirements of the CV application met the latency requirements imposed by corresponding CV applications. We conducted a case study to evaluate the efficacy of CVDeP using two CV applications (one safety and one mobility application) and validated them through field evaluation at the Clemson University Connected and Autonomous Vehicle Testbed (CU-CAVT).
Sub-Project 2: Vision-based Navigation of Autonomous vehicle in Roadway Environments with Unexpected Hazards
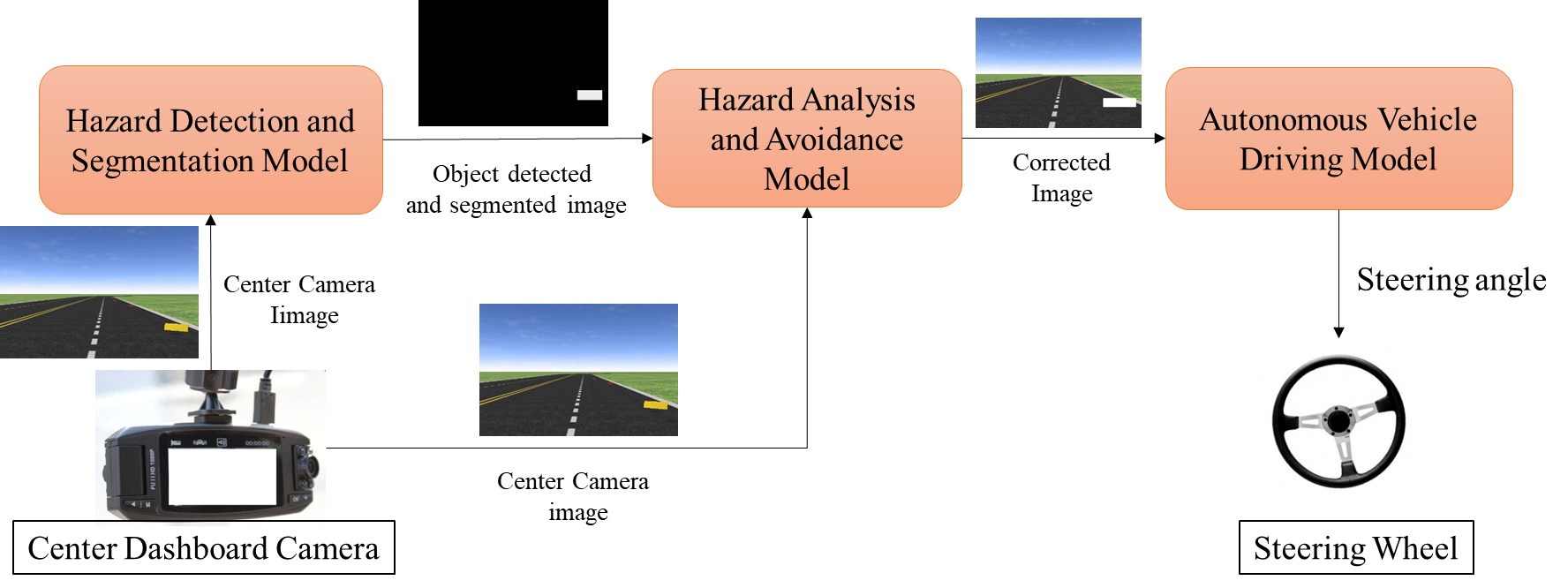
Framework of an autonomous vehicle driving in an unexpected hazardous environment
In this study, we first introduce a roadway hazardous environment (both intentional and unintentional) that can compromise the DNN-based system of an autonomous vehicle, producing an incorrect vehicle navigational output, such as steering wheel angle, which can cause crashes resulting in fatality and injury. Then, we develop an approach based on object detention and sematic segmentation to mitigate the adverse effect of this hazardous environment, one that helps the autonomous vehicle to navigate safely around such hazards. This study finds the DNN-based model with hazardous object detention and semantic segmentation improves the ability of an autonomous vehicle to avoid potential crashes by 21% compared to the traditional DNN- based autonomous driving system.