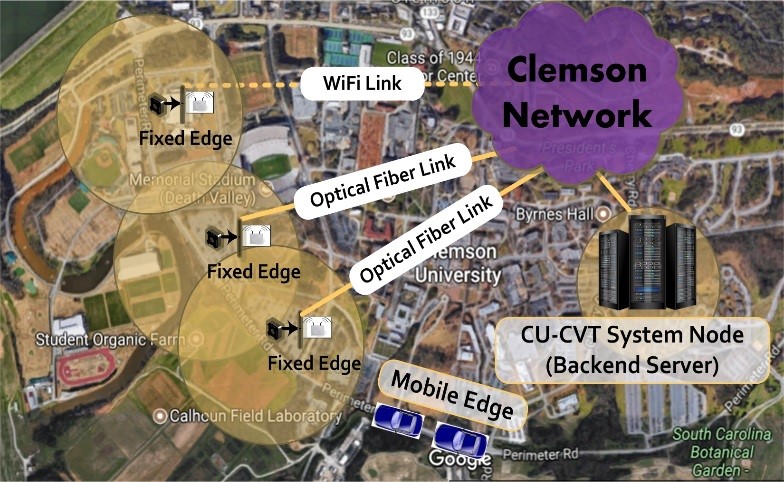
The Center for Connected Multimodal Mobility (C2M2) is developing a cyber-physical system (CPS) for connected and autonomous vehicle research by utilizing and enhancing the functionalities of the Clemson University Connected Vehicle Testbed (CU-CVT), located in Clemson, South Carolina, to support the future research at partner institutions. Our CPS at CU-CVT includes heterogeneous wireless communication technologies and data infrastructure for real-time connected vehicle (CV) data exchange, streaming, fusion and archiving. One of the key features of CU-CVT testbed is the implementation of layered architecture, which enables the reduction of data delivery delay for the services provided by our CPS and supports reduced bandwidth requirements and data loss. These are necessary to accommodate a large number of CVs, and to simultaneously support multiple and diverse CV applications.
CU-CVT for Connected and Autonomous Vehicle Research
One of the first research goals for the C2M2 is to offer engineering support to help researchers connect to and use the CPS of our CU-CVT infrastructure. To this end, we are developing a toolkit to make our CU-CVT data available to C2M2 partner institutions (i.e., Benedict College, The Citadel, the State University of South Carolina, and the University of South Carolina). The primary focus of our current research is to develop and evaluate CV applications in a real-world environment. Many CV applications require the data to be shared through online and in real time. Real-time data sharing will support remote users (CV application developers and researchers) who do not have access to a CV testbed to evaluate and develop existing and new applications, thus supporting accelerated development of the CV environment.
In our CPS, traffic signals, vehicles, and pedestrians exchange data in real-time. Currently, we are developing algorithms for CV applications where vehicles can maneuver in a safe and eco-friendly manner at signalized intersections with the aim of reducing crashes, fuel consumption, and vehicle emissions. Our CV application research considers different CV penetration levels and data loss rates through the use of distributed Big Data analytics supported by backend data infrastructure and advanced heterogeneous wireless communication technologies.
Our research also focuses on vehicle-to-infrastructure (V2I) cybersecurity in our CPS. In order to provide the right level of protection, Vehicle-to-Infrastructure (V2I) interfaces must be analyzed for developing security control given the data and means for transmission in a V2I environment. Our current research focuses on (a) development and deployment of novel network protection tailored to various security requirements in a CV ecosystem, and (b) dynamic customization of a network’s security posture depending on the operating context of different vehicles and surrounding roadway environments. We have developed a new software-based security architecture, called CVGuard, which is designed to protect CVs in a V2I communication environment.
Our ongoing research on connected autonomous vehicle (CAV) systems includes communication, human factors and data analytics that can lead to information-aware and data-driven CAV systems. We are utilizing the CPS facilities and hardware-in-the-loop simulations for information-aware and data-driven connected autonomous vehicle (CAV) research. To achieve a reliable, user acceptable, comfortable and affordable CAV system, it is necessary to push technological advancements and multi-disciplinary research not only on sensing technologies and control systems but also on communication technologies (i.e., vehicle-to-vehicle (V2V) communication as well as V2I), human factors and data analytics.