
Research Topics
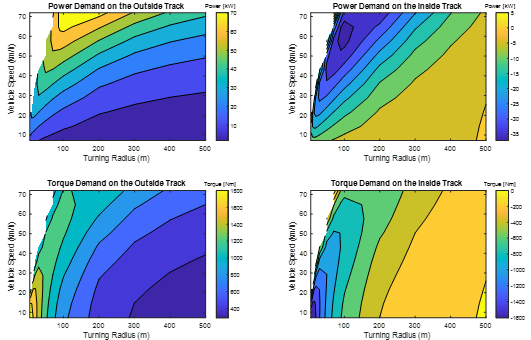
Control oriented tracked vehicle model for powertrain and mobility simulation and control
Optimal powertrain and thermal control
Driving cycle generator based on given vehicle usage scenarios
Design space exploration for hybrid electric tracked vehicles
Contact Us
Qilun Zhu, Ph.D.Research Associate Professorqilun@clemson.edu(864) 283-72394 Research DriveGreenville, SC 29607