
Motivation
Need for reliable, cost-effective transportation for a healthy economy.
Environmental benefits from reducing greenhouse gas and criteria emissions.
Commercial vehicle engines are a significant and growing source of transportation emissions.
Opposed-piston (OP) engines offer potential for reduced CO2 and NOX emissions and lower manufacturing costs.
Goal
Develop a new prototype two-cylinder engine.
Use experimental data to design a scalable OP Class 3-6 diesel engine.
Achieve over 10% fuel economy improvement compared to a 2015 Isuzu commercial vehicle.
Meet current and future-year criteria emissions.
Approach
Collaborate with Achates Power Inc., Isuzu Technical Center of America, Clemson University, and the University of Wisconsin.
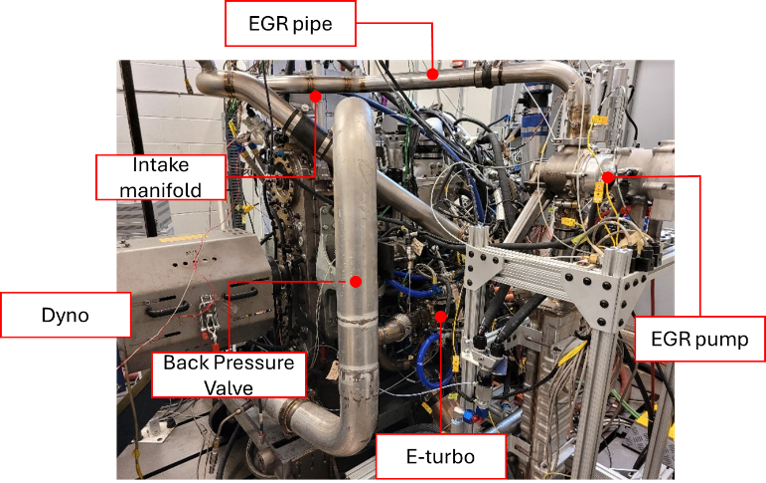
Design and test a new two-cylinder OP engine prototype.
Optimize combustion chamber and air system using experimental and simulation data.
Validate models with experimental data from the prototype.
Implement Model Predictive Control (MPC) for Transient Control
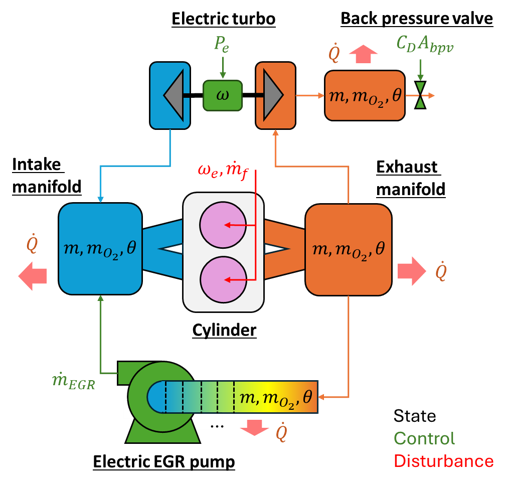
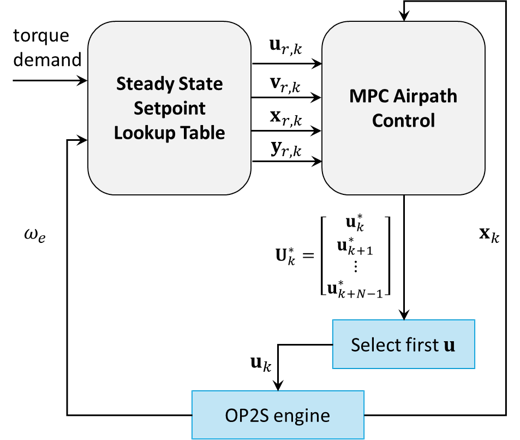
Utilize MPC to enhance transient air path control, ensuring efficient cylinder charge preparation. Coordinate multiple actuators simultaneously to optimize engine performance during transient conditions.
Develop offline MPC calibration routines to identify optimal control actions for various engine states.
Validate MPC models with experimental data to improve real-time engine control, reducing turbo lag and enhancing fuel efficiency.
Employ MPC to minimize calibration efforts and accelerate the development process, ensuring the OP engine meets emissions standards while achieving superior transient performance.
Contact Us
Qilun Zhu, Ph.D.Research Associate Professorqilun@clemson.edu(864) 283-72394 Research DriveGreenville, SC 29607