EMC2: Efficient Mobility via Connectivity and Control
Guided by a core background in Dynamic Systems and Control and more specifically in Optimal Control and Model Predictive Control Methods, our research focus over the past few years has been on : i) Connected and Automated Mobility and exploring the impact of vehicular connectivity and autonomy on increasing energy efficiency and mobility of vehicles. ii) Alternative Propulsion and Energy Storage Systems and integration, modeling, and control of renewable energy devices such as ultracapacitors, batteries, and fuel cells.
1. Connected and Automated Mobility
[You can watch a presentation of some of our more recent work [here]
CAVs offer huge potentials for boosting road safety, capacity, and efficiency, because of their ability to process data from many more sources (e.g. V2X fused with on-board sensing) and their ability for more precise positioning and control than human drivers.In the past few years we have been exploring the role that information technology can play in improving mobility and energy efficiency of connected and automated vehicles. We have formulated algorithms that use preview information of terrain [J12], [J15], traffic signal timing [C15], [J14], and traffic flow [C19] for saving fuel and reducing emissions of modern vehicles with conventional or hybrid powertrains. A recent review paper can be found here [J32].
The proposed solutions enable fuel saving and improve mobility relying mostly on software and information and with minimal hardware investments. This impacts not only the high-tech vehicles of the future but the current fleet with WLAN or cellluar connectivity. If successfully deployed, our methods can lead to dramatic reduction in CO2 emissions and total national fuel use with direct societal and economical impacts. Our main sponsor in this work is the National Science Foundation and Department of Energy but our work has created wider interest and attracted additional sponsors and collaborators.

Anticipative Car Following and Lane Selection: A step up from the work in [J14] is our results in [C19] in which we propose predictive use of traffic flow for planning more fuel efficient trips. This is an ongoing and more challenging work, due to complexity of traffic prediction and dynamic nature of the traffic constraints imposed. A recent Department of Energy grant has accelerated our progress in this field. We are developing perception and anticipative guidance schemes for connected autonomous vehicles (CAVs) and quantify their energy saving potential in large scale traffic microsimulations at different levels of technology penetration. More recent results here [J29, J31]. The following video is a highlight of this collaborative project with more details about the team here.
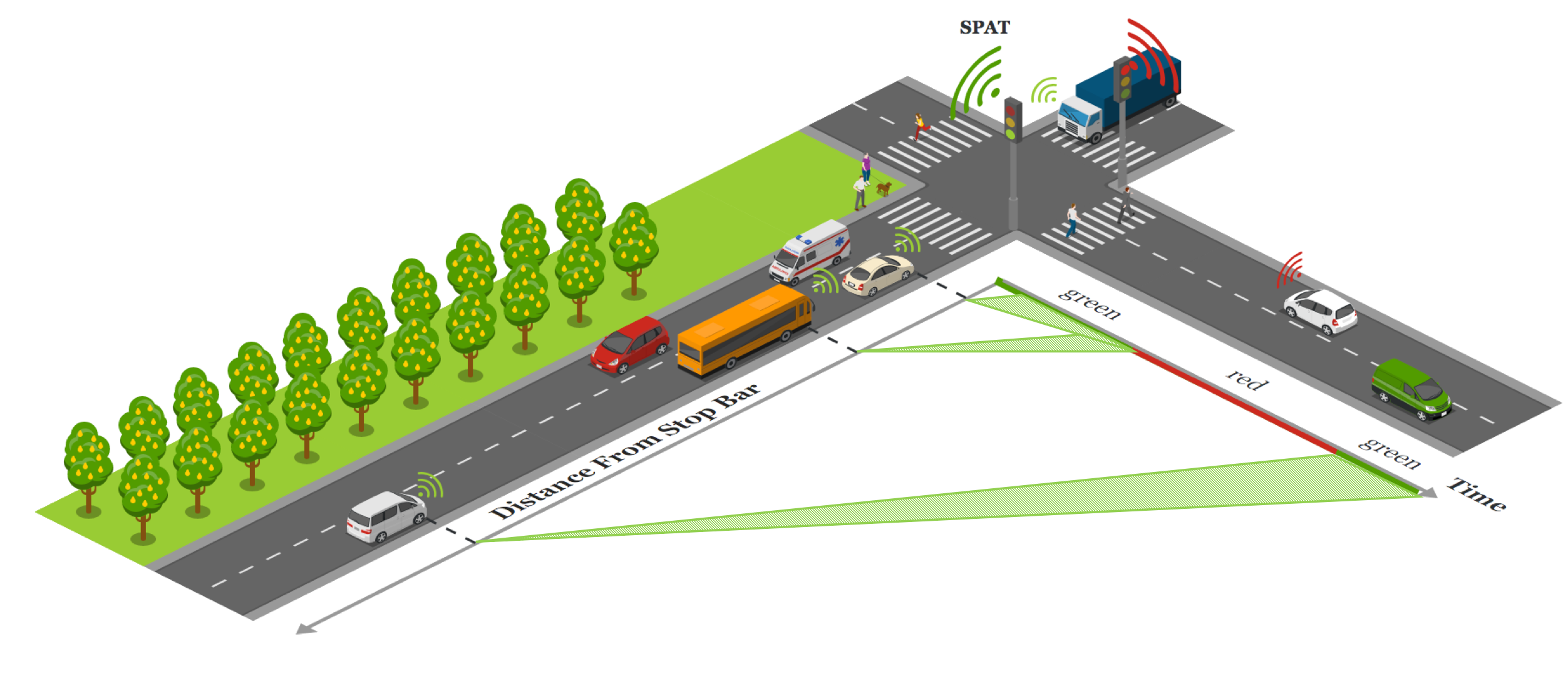
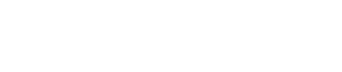
Traffic Signal Preview: Our papers [C15] and [J14], to the best of our knowledge, are the first to propose use of preview information of signal phase and timing of multiple upcoming traffic signals for enhancing mobility and fuel economy of vehicles and shows the potential for significant energy savings. We have a patent, and have also created an iPhone App [video] that suggests an eco-friendly speed to the driver based on future state of upcoming traffic signals, GPS location of the car, and a dynamic optimization algorithm that we have developed. In a collaborative project with BMW during 2012-2013, our Clemson team (Alireza Fayazi and Grant Mahler) put in place the backend computing architecture that collects vehicular probe data in real-time on a computing cloud, processes the data, estimates traffic, and then relays the processed information to subscribing vehicles [video]. We also have functions in place in test vehicles that use the incoming information for reducing energy use. We have shown the proof of concept in locations in San Francisco and San Jose, California as described by our group former Ph.D. student Dr. Grant Mahler in the following video.
{kind=link}
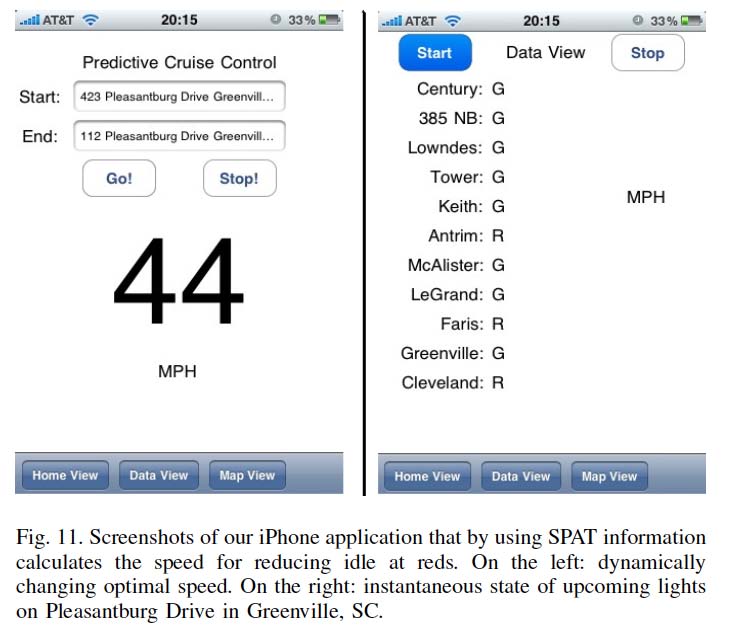
Intelligent Intersections: More recently we have been exploring the added efficiency afforded by vehicle autonomy via better coordination with smart traffic control infrastructure when traffic signals can be eliminated [video, press]. In our paper [J30] the vehicle arrival scheduling is formulated as a mixed-integer linear program (MILP), and is solved by IBM CPLEX optimization package. The optimization outputs (scheduled access/arrival times) are sent to all approaching vehicles. The autonomous vehicles adjust their speed accordingly by a proposed trajectory planning algorithm with the aim of accessing the intersection at their scheduled times. We have shown the feasibility of proposed methods in Vehicle-In-The-Loop simulations also covered in several recent news stories [news1, news2]. In this work a real vehicle interacted with hundreds of simulated vehicles in our microsimulation environment, written in Java and all communicated to an intersection control server. The simulator node was mounted inside a test vehicle so that collisions could be visually identified. The test track at International Transportation Innovation Center (ITIC) in South Carolina was used in our previous work. The following videos and news stories capture glimpses of this work led by our group former Ph.D. student, Dr. Alireza Fayazi.
Coverage: News 13, Fox Carolina, ArsTechnica, Clemson News
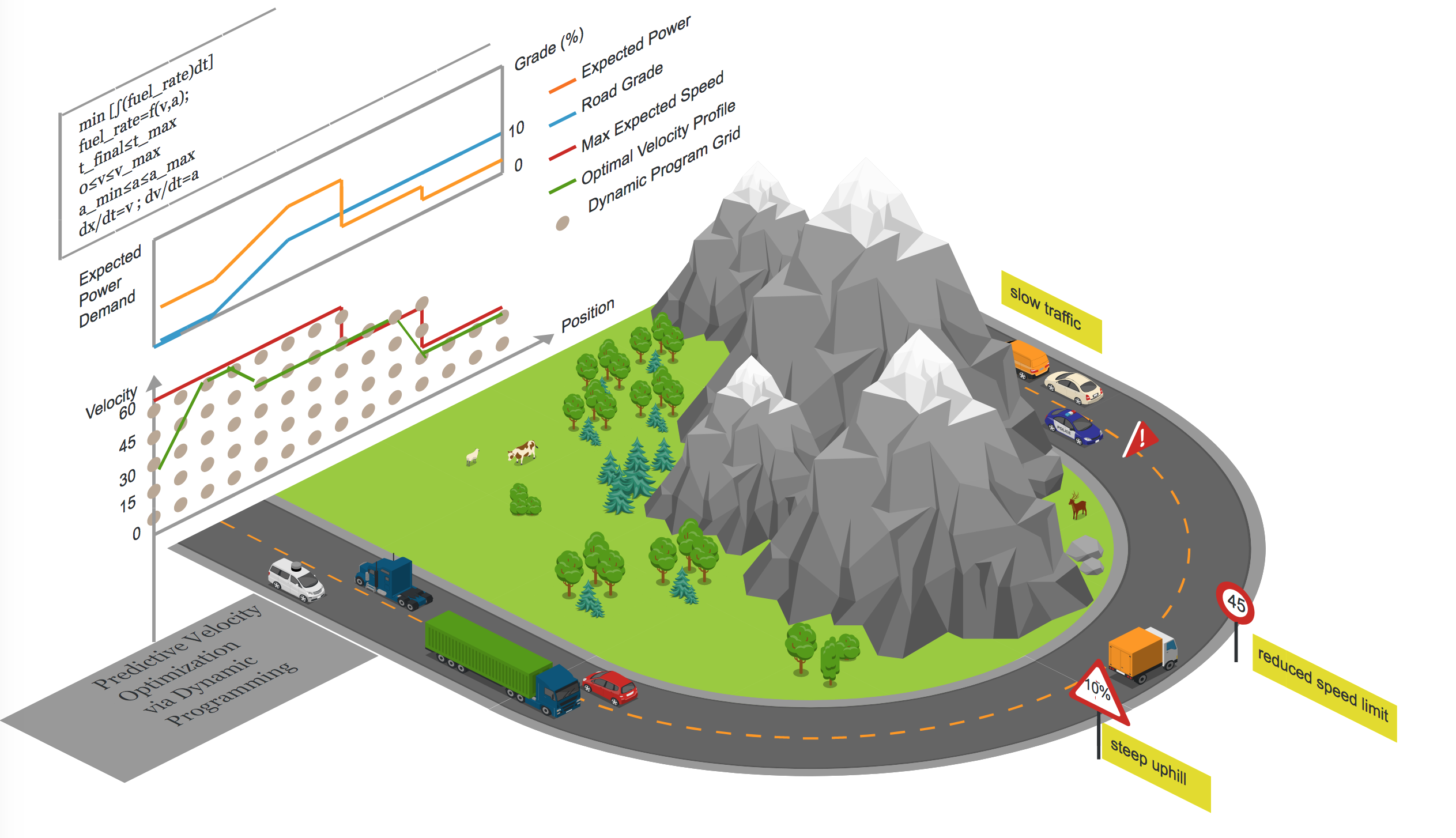
Terrain Preview: Prior knowledge of road speed limits, safe speeds on curved roads, and an estimate of average traffic speed allows for more energy efficient velocity transitions in anticipation of the change in velocity constraints. Another dominating factor in vehicle power demand is road grade, in particular on steep roads, and more so for heavier vehicles. For instance we have published results that quantify the potential benefits attainable by terrain preview for hybrid vehicles. Our perspective presented in [J12] shows that utilizing digital maps will not only increase the fuel economy but can also help reduce battery’s charge cycle, which may help longevity of the battery. In [J15] we present reduced computation methods that allow utilization of road preview in real-time. The digital map company, Intermap Technologies, has been our main industrial sponsor and collaborator ( Press Release) with additional support provided by NSF and ARC.
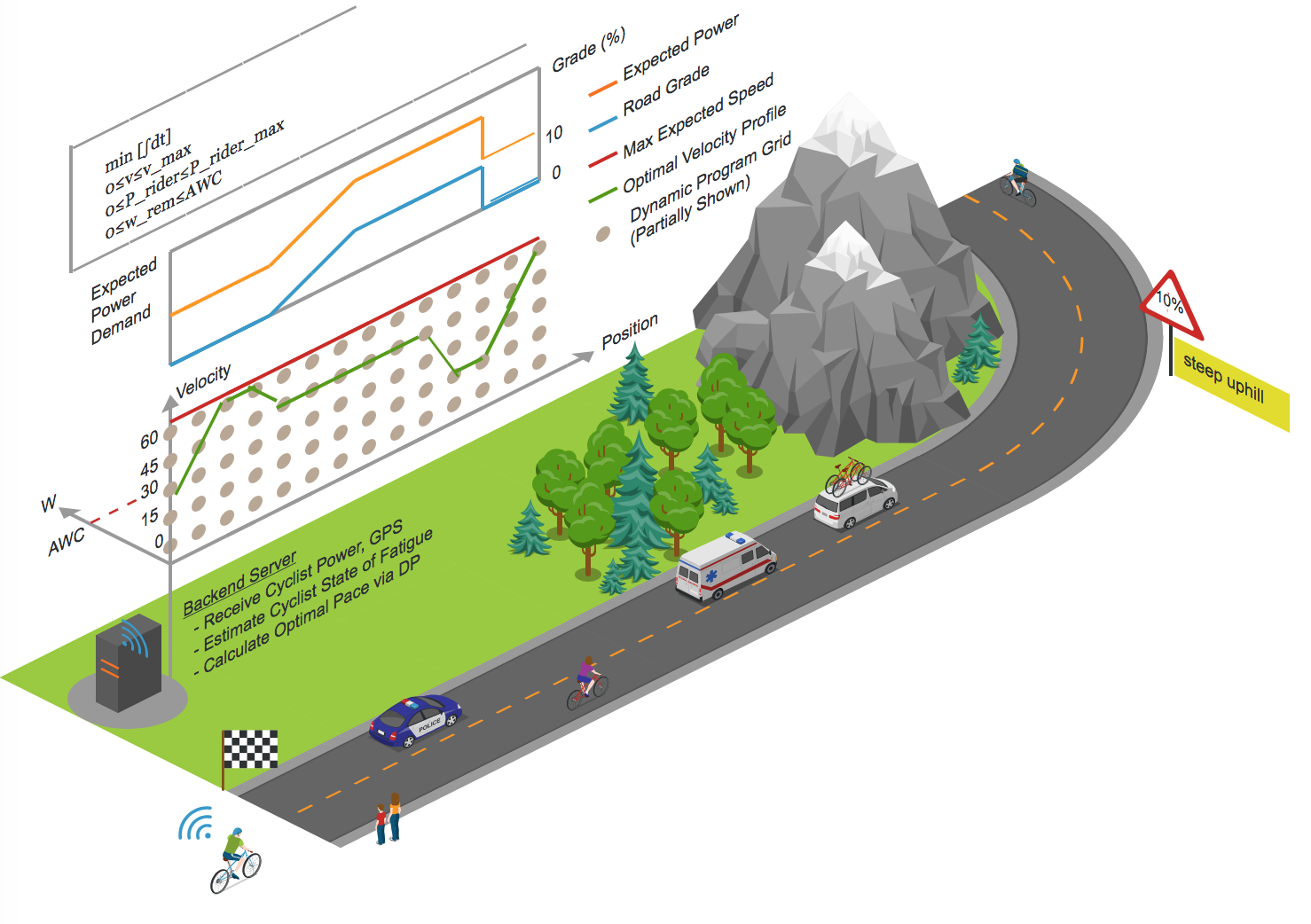
Optimal Pacing of Cyclists: This is a different research direction in our group. We are exploring dynamics of muscular fatigue and recovery. This is important in human-machine Interactions and in adaptive balancing of the physical load on a human operator. In the crowded research field of muscle physiology, we are introducing a novel perspective by modeling the dynamics of fatigue; and attempting to use high-tech wearable sensors for noninvasive measurement of fatigue. Our earlier papers on this topic are [C26–C28]. Currently in collaborations with other faculty at Clemson and Furman Universities, we are working with human subject cyclists to help them pace themselves optimally along a mountainous trail using optimal control methods. Most recent results can be found in [C46, J36, J41]. The following video shows the experiments performed on a stationary trainer in Dr. Randy Hutchison Furman University Lab. Clemson Ph.D. students Faraz Ashtiani from our group and Vijay Sarthy from Dr. Gregory Mocko‘s group led the experiment design, cyclist model identification, and optimal control formulation and execution. Thanks to Furman student, Mr. Alec Whyte, for demonstrating the system in the following video (he was not one of the test subjects).
2. Alternative Propulsion and Energy Storage Systems:
We have been working on topics in the general area of renewable energy systems, based on the vision that renewable energy solutions will be pertinent to sustainable technological growth and that energy is going to play a central role in the global economy for the years to come. Our work spans: i) advanced propulsion and storage technologies, i.e. fuel cells and ultracapacitors, ii) novel optimization-based energy management techniques for hybrid powertrains, and iii) use of preview information for better energy utilization in hybrid vehicles.
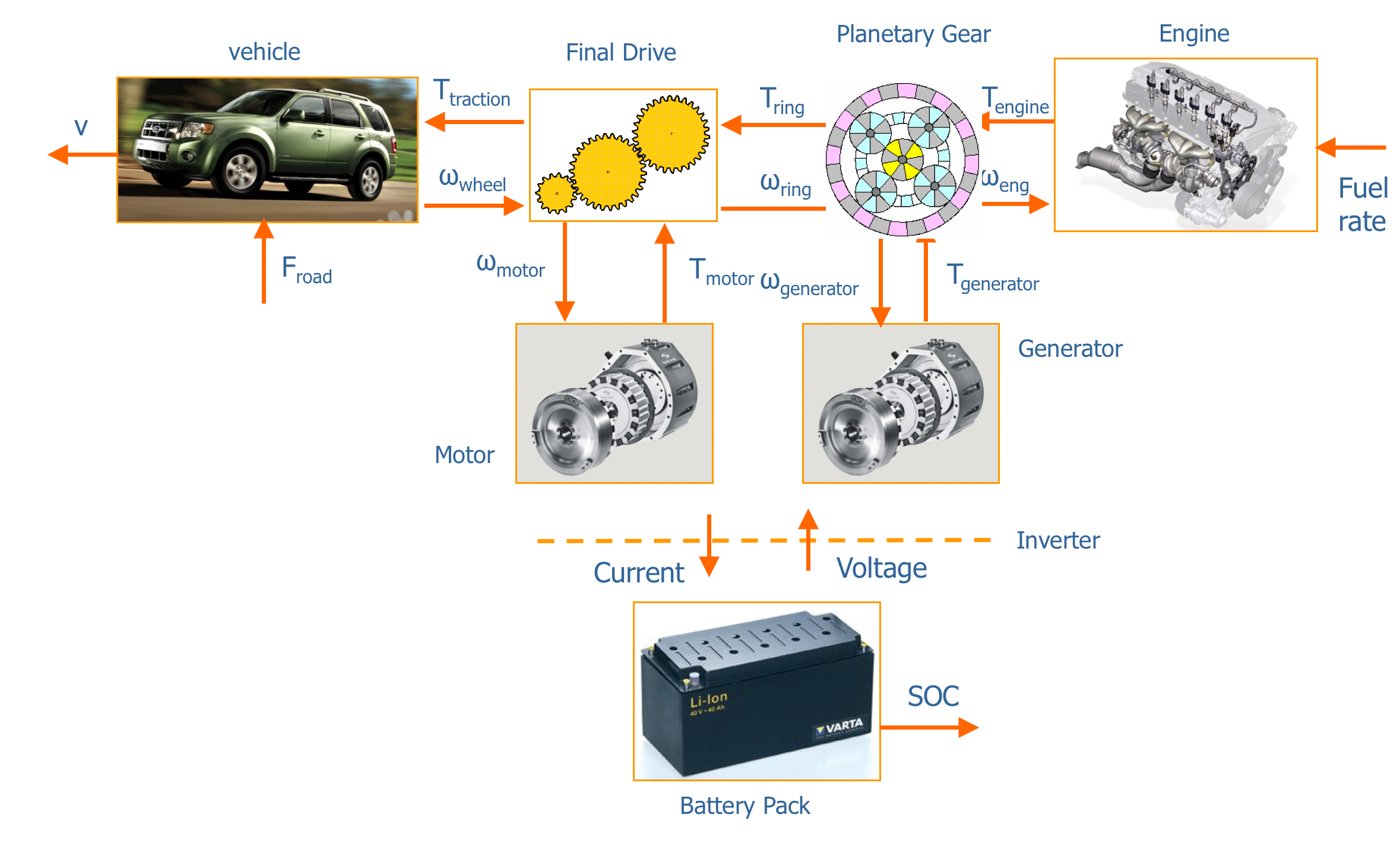
Hybrid Powertrains: We have been the first group to showcase a real time optimization approach for energy management of hybrid powertrains reducing control calibration time and improving energy efficiency. The energy management of a hybrid vehicle is a complex control problem due to strong nonlinearities, various constraints, and model and disturbance uncertainties. Our approach presented in [J16] which employs nonlinear model predictive control, evolved over more than three years of extremely hard work and under close monitoring of Ford scientists. The result is an algorithm based on fundamental control theoretical concepts that achieves close-to-optimal fuel economies and has the potential for real-time implementation. (See tutorial presentations on modeling and control of hybrid vehicles presented at the 2008 American Control Conference [here]).
Ultracapacitors: Ultracapacitors are high power density energy storage devices with capacitances in the order of hundreds of Farads, capable of releasing bursts of power in the order kilowatts. While their value is acknowledged as compared to modern batteries, few analytical and experimental studies have explored their true merits. Most existing studies have considered ultracapacitors for auxiliary energy storage along with batteries and fuel cells, including our paper [J11]. Our paper [J13] is the first, to our best knowledge, to suggest using ultracapacitors, stand-alone, for providing power boost in a mild hybrid powertrain. Our meticulously executed model-based simulations indicate that fuel savings up to 15% can be achieved by taking advantage of power boosts and energy recuperated during braking. More recently we have shown in [J24] the benefits can be larger, up to 40%, for heavy trucks such as delivery vehicles with many stops and goes. We have also experimentally modeled ultracapacitors at sub-zero temperatures [J20]. Our research on supercapacitors was supported by Ford Motor Company and ARC.
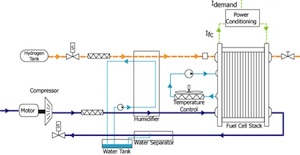
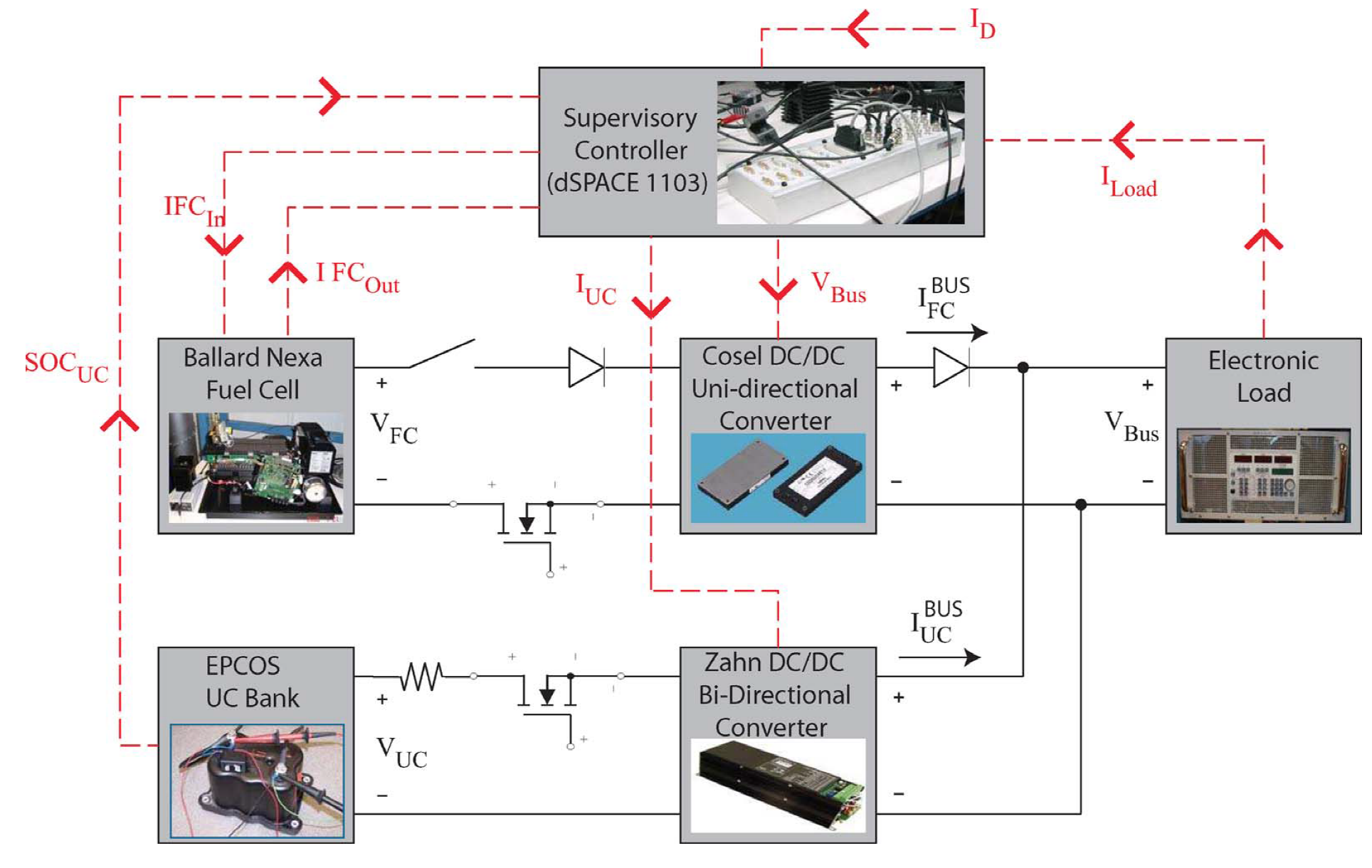
Fuel Cells: In continuation of the work in [J7] and [J8], we have worked on system architecture, power management techniques, and the power electronics needed for integrating fuel cells with ultracapacitors. Our experimental testbed includes a 1.2kW PEM fuel cell stack integrated with high-power density ultracapacitors using multiple power electronic devices and an advanced control system [see setup here]. We experienced several hurdles in selection of power electronic devices and in integration and control of the fuel cell and ultracapacitor. We hope to have addressed some of these issues in our paper [J11] helping future researchers and practitioners. Our review paper [J9] addresses the important issue of durability in fuel cells. The following video (circa 2004) shows how with a model predictive control we avoid compressor surge in a fuel cell air handling system during current transients.
{kind=link}
Our lab has been supported by:
